足郎2の部品設計図を書いているが、穴あけの位置など、複雑で、作ったやつを合わせて見ないとイメージしにくい。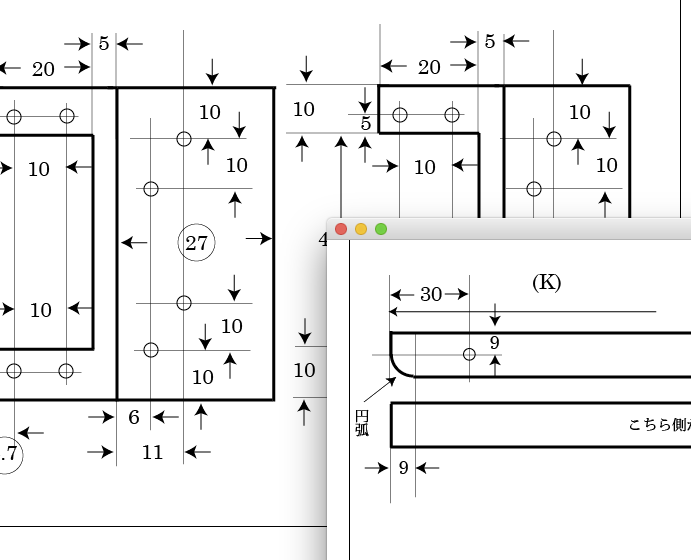
だから、まず紙で実際に作って見た。すると、実によくわかる。

モアイ像の歩行と足郎1の逆振り子型の二足歩行
同僚の先生に、足郎1の逆振り子型の二足歩行の動画を見せたところ、これが、モアイ像を揺らして動かしたという説の映像とそっくりだという。
確かに。これだ!!!次の足郎1の歩行と、基本同じではないか!!!
足郎1の逆振り子型の二足歩行は、基本体を揺らして、前後の動きをプラスしているだけである。モアイ像の姿と同じである。左右にいる人々が揺らしている状況を、足郎1の上にあるサーボモータが代わりにやっているだけである。
人間の二足歩行も、極めてエネルギー節約的だが、これもまた、逆振り子型の二足歩行だからなのだ。
足郎2の設計図もほぼできた。部品の発注を二、三日中にはできるだろう。本格的な逆振り子型二足歩行ロボットが創り出されるはずである。
足郎2を構想する
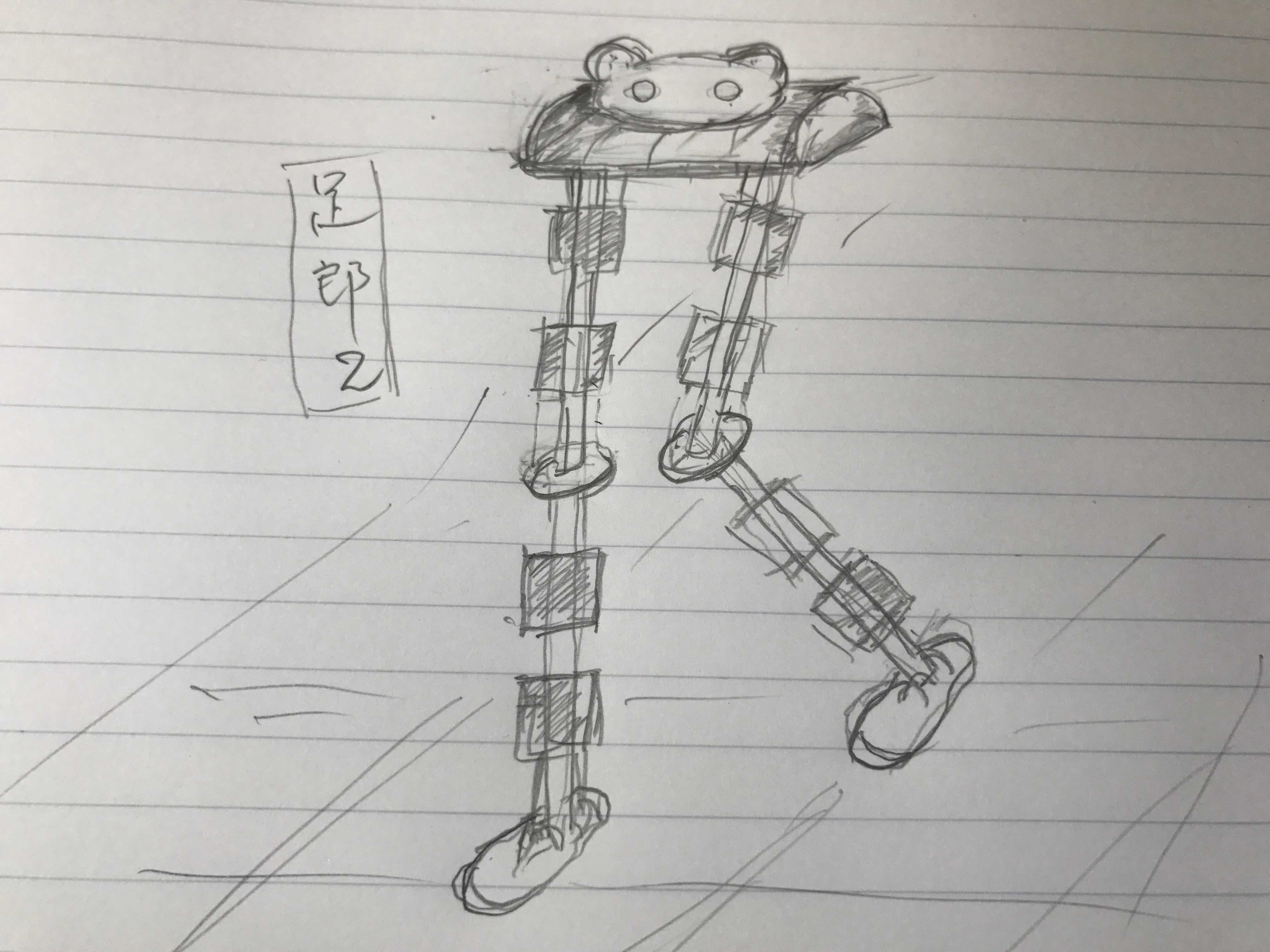
足郎2は、逆振り子型の二足歩行とクラウドを利用した知的会話機能を持たせる。以下はイメージ図だが、サーボモーター類は、3Dプリンタでちゃんとカバーを作る予定だ。
膝がある方が、二足歩行の実現はよほど楽だ。その辺りは、足郎1で実感している。
「ハウルの動く城」の最後の姿に似ている(笑)
サーボモーターを支える板が最も細かい部品なので、それから設計にかかる。
空いた時間に、ロボットのシミュレータを作るつもりだ。サーボモータ類の動きとロボットの動きが視覚的に確認できるものにしたい。
足郎1の開発を終える
足郎1で調べたいことは、ほとんどやり終えたと思う。
これ以上調べても、それは、膝のない、足郎1の特殊な状況での問題だけなような気がするからだ。
膝があり、高さが足郎1のほぼ倍になるはずの、足郎2の設計を始めよう。足郎1で問題だったところを全て解決するような設計にしたい。
アルミの部品は、ほぼ、外注にしようと思う。パーツはそんなに多くない。倍にはならないだろうと思う。
足郎1は、分解して、RaspberryPIや、16個のサーボモーターを再利用する予定だったが、愛着があるので、これはこれで、そのまま残しておこうと思う。ちゃんと動く状態にしておこう。
かなり完成に近づいた、逆振り子二足歩行
前回のやつにわずかに前後の動きを付け加えたら、ほぼ、一番最初にイメージした逆振り子型の二足歩行になってきた。
正直、ここまでうまくいくとは思わなかった。
逆振り子歩行の最初のアイデアは、今年の4月の記事、
http://robo.genv.sophia.ac.jp/wp_robot/?p=1240
にある。
逆振り子二足歩行3
逆振り子から出発して、歩行を組み込もうとして、ぎこちなくなってまた逆振り子から出発し直すを何度か繰り返して、やはり逆振り子そのものをきちんとやりきることが大切だと思うようになった。
これは、ただ、逆振り子をきちんとしているだけだが、一見二足歩行になってしまっている。しかも、前回の、二足歩行を無理無理入れた感じもない。
これだ!これこそやりたい二足歩行の原型だ!
この間、制御システムAicoをいじった。うえ向きのサーボと下向きのサーボで、引きと緩めるの方向が逆だったのを統一して、常にプラスの値をあたえると引きになるようにしたり、クライアントのJAicoで、エディターのマルチウィンドウを実現したりの改良もやった。
逆振り子型二足歩行2
歩行の形を少し整えた。
足が上がっていないにもかかわらず、歩いているかのような感じになってきている(笑)
これで、折りたためる膝があれば、普通に歩けると思うのだが。
まあ、もう少し、この膝なし足ロボットで試験しよう。
cosmで書いた制御プログラムは次のようなものだ。何か、それらしい感じを読み取ることができるのかもしれない。
#######################################
# ashiro1-10.cosm
# 逆振り子二足歩行
# 2017年7月4日 作成
# 2017年7月6日 ver.2
# 傾けた時に、前後の足を戻す操作を入れる
#######################################
%defspeed normal {
interval:3
#steps:25
steps:15
}
%defspeed fast {
interval:3
#steps:25
steps:10
}
# 40にすると倒れる
%param invpen_angle 35
# 揺れの逆足の開き角度
# 揺れた時に、揺れる方向の逆足が少し開いていないと、
# 近づきすぎて倒れる:逆足の吊り上げ角度にもなっている
# %param open_inv 15
%param open_inv 20
# 釣り上げられた足の閉じる方向への角度
%param close_inv 10
######################################
# 0 バージョンは、前後の足の動きを意識しないもの
# 最初の揺らしに使うと思う
######################################
%defangles right_invpen_0 {
#右に傾ける動きをする
# 逆足は開きを少し大きくしないと縮まって倒れる
RightUpperRight:$invpen_angle-$open_inv
RightUpperLeft:-$invpen_angle+$open_inv
LeftUpperRight:$invpen_angle-$close_inv
LeftUpperLeft:-$invpen_angle+$close_inv
# 上の動きに合わせて、足も角度をつけて
# 床にぴったりさせようとしているが、ちょっとずれている
RightLowerRight:$invpen_angle
RightLowerLeft:-$invpen_angle
# 逆足は開きを少し大きくしないと縮まって倒れる
LeftLowerRight:$invpen_angle
LeftLowerLeft:-$invpen_angle
}
%defangles left_invpen_0 {
#左に傾ける動きをする
# 逆足は開きを少し大きくしないと縮まって倒れる
RightUpperRight:-$invpen_angle+$close_inv
RightUpperLeft:$invpen_angle-$close_inv
LeftUpperRight:-$invpen_angle+$open_inv
LeftUpperLeft:$invpen_angle-$open_inv
#
RightLowerRight:-$invpen_angle
RightLowerLeft:$invpen_angle
LeftLowerRight:-$invpen_angle
LeftLowerLeft:$invpen_angle
}
######################################
# 1 バージョンは、前後の足の動きの中で使う
# 前のステップで開いた足を戻す、前後の操作が入る
# 後ろに残っている足は、前足が垂直になるまでに
# さらに追加的に開く
%param excess_open 10
######################################
%defangles right_invpen_1 {
#右に傾ける動きをする
# 逆足は開きを少し大きくしないと縮まって倒れる
RightUpperRight:$invpen_angle-$open_inv
RightUpperLeft:-$invpen_angle+$open_inv
LeftUpperRight:$invpen_angle
LeftUpperLeft:-$invpen_angle
# 上の動きに合わせて、足も角度をつけて
# 床にぴったりさせようとしているが、ちょっとずれている
RightLowerRight:$invpen_angle
RightLowerLeft:-$invpen_angle
# 逆足は開きを少し大きくしないと縮まって倒れる
LeftLowerRight:$invpen_angle
LeftLowerLeft:-$invpen_angle
# 前後に開いた足の処理
# 右足が前、左足が後ろの状態で開いている
# 前になっている右足を、直立状態まで戻す
# 後ろ足は、床に設置したまま、傾きを加える
#
RightUpperFront:0
RightUpperBack:0
LeftUpperFront:-$step_length-$excess_open
LeftUpperBack:$step_length+$excess_open
#
RightLowerFront:0
RightLowerBack:0
LeftLowerFront:-$step_length-$excess_open
LeftLowerBack:$step_length+$excess_open
}
%defangles left_invpen_1 {
#左に傾ける動きをする
# 逆足は開きを少し大きくしないと縮まって倒れる
RightUpperRight:-$invpen_angle
RightUpperLeft:$invpen_angle
LeftUpperRight:-$invpen_angle+$open_inv
LeftUpperLeft:$invpen_angle-$open_inv
#
RightLowerRight:-$invpen_angle
RightLowerLeft:$invpen_angle
LeftLowerRight:-$invpen_angle
LeftLowerLeft:$invpen_angle
#
RightUpperFront:$step_length+$excess_open
RightUpperBack:-$step_length-$excess_open
LeftUpperFront:0
LeftUpperBack:0
#
RightLowerFront:$step_length+$excess_open
RightLowerBack:-$step_length-$excess_open
LeftLowerFront:0
LeftLowerBack:0
}
######################################
# 前後に開く(すでに重心が移ったのちの動作)
# 歩幅
%param step_length 15
# 出した方の足が着地する時に、後ろに倒れないよう
# 少し前かがみ加減の角度で足先を出す
%param slouch 10
######################################
%defangles right_forward_1 {
# 右に傾いた時に、左足を前に、右足を後ろにする動作
RightUpperFront:$step_length
RightUpperBack:-$step_length
LeftUpperFront:-$step_length
LeftUpperBack:$step_length
#
RightLowerFront:$step_length
RightLowerBack:-$step_length
LeftLowerFront:-$step_length+$slouch
LeftLowerBack:$step_length-$slouch
}
%defangles left_forward_1 {
# 左に傾いた時に、右足を前に、左足を後ろにする動作
RightUpperFront:-$step_length
RightUpperBack:$step_length
LeftUpperFront:$step_length
LeftUpperBack:-$step_length
#
RightLowerFront:-$step_length+$slouch
RightLowerBack:$step_length-$slouch
LeftLowerFront:$step_length
LeftLowerBack:-$step_length
}
%defexec walk {
stand:all
speed:normal
# 右に倒す、前後の動作は何もしない
# 半分の動きしかできず、揺れが小さいので
setAngle:right_invpen_0
# 揺れは早く動かす
# 左に倒す
speed:fast
setAngle:left_invpen_0
# 足を開く
# 開くときは、normalにする
speed:normal
setAngle:left_forward_1
# 普通の歩行に移る
exec:walk_sub,3
}
%defexec walk_sub{
# 逆の動きに対応するバージョン
# 右に倒す
speed:fast
setAngle:right_invpen_1
# 足を開く
speed:normal
setAngle:right_forward_1
# 左に倒す
speed:fast
setAngle:left_invpen_1
# 足を開く
speed:normal
setAngle:left_forward_1
}
%exec walk 1
逆振り子型二足歩行
ネタロボット試作機足郎1に、以前二足歩行させてみた。
http://robo.genv.sophia.ac.jp/wp_robot/?p=1330
が、これは、もともと考えていた歩行とは違っていた。しかも、この方法では、このような足だけのロボットは早い動きができない。
そこで、最初からの計画に従って、逆振り子の中で歩行する方法を地道に追求しようと思っている。
ロボットの体を左右に揺らせる、これは結構早くできる。
この揺れの中に、前後の足の動作を組み込んでみた。
動かすサーボが倍になったので、揺れが遅くなって足が上がっていない。
しかし、早く歩行ができそうな気がしている。
リモートコントローラー JAico
基本、ロボット足郎のRaspberryPIにsshでログインして、ロボットを制御していたが、cosmで書かれた制御プログラムを、パソコンで編集して、それを足郎に転送して、とかいう作業が面倒になった。
そこで、パソコンから足郎のRaspberryPIで動かしている制御ソフトAicoを制御した方が楽だと思って、Aicoにサーバー機能を持たせ、それに接続するパソコン上のクライアントJAicoをJAVAで作成した。面倒なことを言ったようだが、ロボットにsshしても制御できるし、パソコンからも直接制御できるようにしたということだ。
Aicoの主要な機能をJAicoからもできるようになった。
さらに、パソコンからの制御の大きなメリットは、JAVAのグラフィックインターフェイスを使えることだ。そのうち、センサーの動きもパソコン側にグラフィカルに表示させることができるようになるだろう。
この過程で、JAVAのソケット機能でサーバー、クライアントをプログラミングしたが、もう、なんどもなんども、この辺りのプログラムは書いてきたのに、色々、詰まった。例えば、サーバーがデータを送ったのか、まだバッファリングしているのかがわからずに、tcpdumpでパケットの送付状況を確認するようなことも、久しぶりにやった。しかし、まあ、無事動いてよかった。
片足立ちさせてみる
ディープラーニングだとかセンサーのことばっかりやっていたが、久しぶりにサーボを制御しようとした。
すると、コントロールソフトAicoをJAVAにしてから、まともにサーボの制御をしていなかったのに気づいた。そのために、制御プログラムのCOSM言語がJAVAのAicoでうまく動かないのに気づいた。いろいろ直した。
それに伴ってAicoもCosmも相当改訂した。
さしあたって、ロボットに片足立ちさせて見た。
どうってことでもない。一応、ちゃんと片足で立っている(左足の隙間!!、笑)。
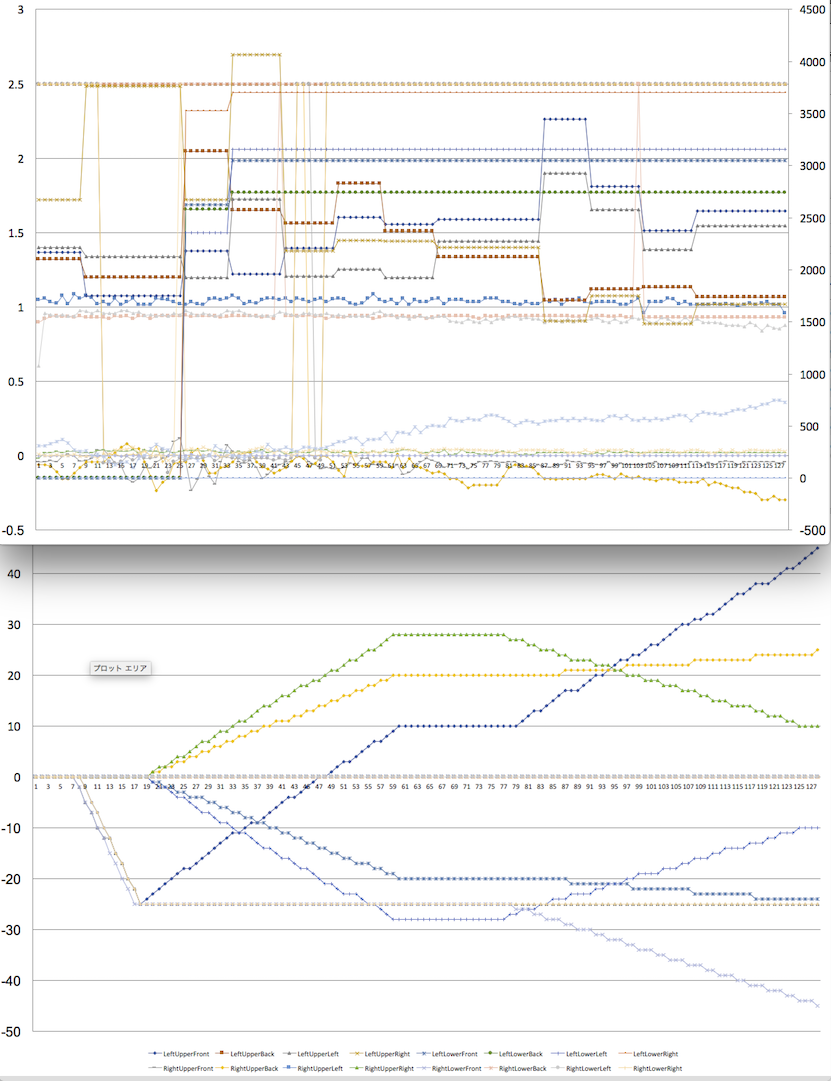
この動きの間、センサーとサーボ角度を全て記録するようにモニターさせた。Cosmのプログラムで制御できる。モニターは、サーボの制御とは別スレッドで動かしている。それを実現するために、I2Cの1チャンネルはサーボだけに割り当てた。センサーは、全てSPIにぶら下げている。
よくみると、正常に動いていないセンサーがある。おい、どうなっているの。
モニターの結果として、うまくいった場合の評点を与えるようにしている。それを通して、倒れてしまうようなまずい状態と、そうでない状態の識別、サーボのコントロールの仕方を強化学習、深層学習をさせようと思っているのに!!
それと、倒れても壊れないように、部屋に太めの鉄線を渡して、そこにぶら下がるようにした。
Cosmのプログラムは以下の通りだが、使っていないスピードやサーボ角度の定義も入っている。
#######################################
# ashiro1-9.cosm
# 2017年6月29日
# 再び1から作り直す
#######################################
%param foot_rest 25 # 足関節の緩和角度
%param null_angle 0 # ゼロ角度
%defspeed slow {
interval:10
steps:40
}
%defspeed normal {
interval:5
steps:40
}
%defspeed fast {
interval:3
steps:10
}
# 右へ
%defangles leg_stand {
RightUpperRight:$null_angle
RightUpperLeft:$null_angle
LeftUpperRight:$null_angle
LeftUpperLeft:$null_angle
}
%defangles foot_rest {
RightLowerRight:-$foot_rest
RightLowerLeft:-$foot_rest
LeftLowerRight:-$foot_rest
LeftLowerLeft:-$foot_rest
# 前後はさしあたってゼロにしておく
RightLowerFront:$null_angle
RightLowerBack:$null_angle
LeftLowerFront:$null_angle
LeftLowerBack:$null_angle
}
%defangles right_leg_phase_1 {
# これだけ完全休息から少し戻しておく
RightLowerRight:28
RightLowerLeft:-28
#
RightUpperRight:28
RightUpperLeft:-28
LeftUpperRight:20
LeftUpperLeft:-20
}
%defangles right_leg_phase_2 {
RightLowerRight:45
RightLowerLeft:-45
RightUpperRight:-5
RightUpperLeft:5
LeftUpperRight:23
LeftUpperLeft:-23
}
%defexec walk1 {
monitor:start
##
stand:all
speed:normal
# ゆっくり右に倒す
setAngle:right_leg_phase_1
delay:500
# ゆっくりと重心のない足を上げる
speed:slow
setAngle:right_leg_phase_2
##
monitor:stop
# この行動に評価を与える
rating:set
}
#以上は全て定義
#以下が、定義以外の実行コマンド
%exec walk1 1