テレパシー機能は、ALmemoryのイベント機能と、ネットワークを結びつけるのが最も単純で、プリミティブな機能として実現することができる。
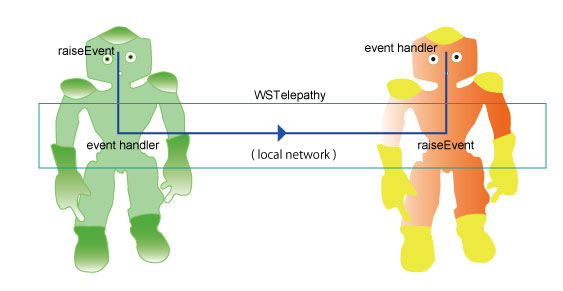
図で説明しよう。左のロボットから右のロボットに伝える場合である。
いま、作成予定のモジュールをWSTelepathyとしよう。受け持つ機能部分は、四角の枠で囲まれている。左のロボットは、緊急に伝えたいことがあると、モジュールに対して、ALMemoryイベントを発生させる。伝えたい内容を、イベントの変数に対する値としてセットする。伝えたいロボットが複数の中の特定の一つである場合は、ロボットを区別する情報(IPADDRESS等)も与えなければならないだろう。
モジュールには送信イベントハンドラが定義されていて、ネットワークにパケットを送り出す。それを受け取った右のロボットは、ロボットに対してイベントを発生させる。ロボットの受信ハンドラがそれを受け取る。受け取り側は、例えばALDialogのイベントとして受け取って、言葉を発するなどということができる。
したがって、WSTelepathyの機能は、ごく単純である。それぞれのモジュールは、受信と送信の両方を担う。