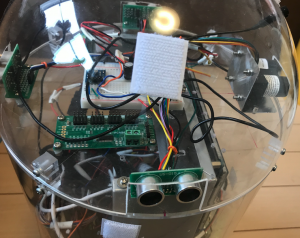
Lidar Lite V3の赤外線距離センサーを前方につけて、自己位置を同定したり、それをもとに、位置調整をしたりはできるようになった。
そこで、残りの三方についている超音波距離センサーでも、できるようにプログラムはくんだ。ただ、センサーがすぐに働かない。C++で書いたセンサーのプログラムを、JAVAのコアシステムから呼び出すようにしてあるのだが、少し、C++の方のプログラムを動かしてからじゃないと、距離が取れない。以下の写真の、右上のように直接何度か動かすと、左下のようにコアシステムから距離が取れて、どこまで正しいか検証はしていないが、自己位置を推定している。
Lidar Lite V3の時のような、電源問題ではないかと思った。ので、Lidar Lite V3と同じように、GPIOから電源をとってテストしようかと思ったが、そもそも、超音波センサーをあまり信頼していないのに、いじっても仕方がないなと思い。これはここで凍結しておこうと思う。
絶対使わないならば、センサーそのものを外しても良いのだが、まあ、その選択肢も睨みながらの保留だ。