サーボドライバーボードのPCA-9685は片足それぞれについている。足郎1のように、上板上のコンピュータ側におくと配線が混雑してダメだからだ。ドライバーボードは16個のサーボモータを制御できるが、片足は10個しかついていない。この二つのボードは、RaspberryPIのI2Cの二つのポートを使う予定だ。RaspberryPIには、デフォルトでは1個のI2Cしか動かせないが、もともと2つついているのでその二つを動かす。
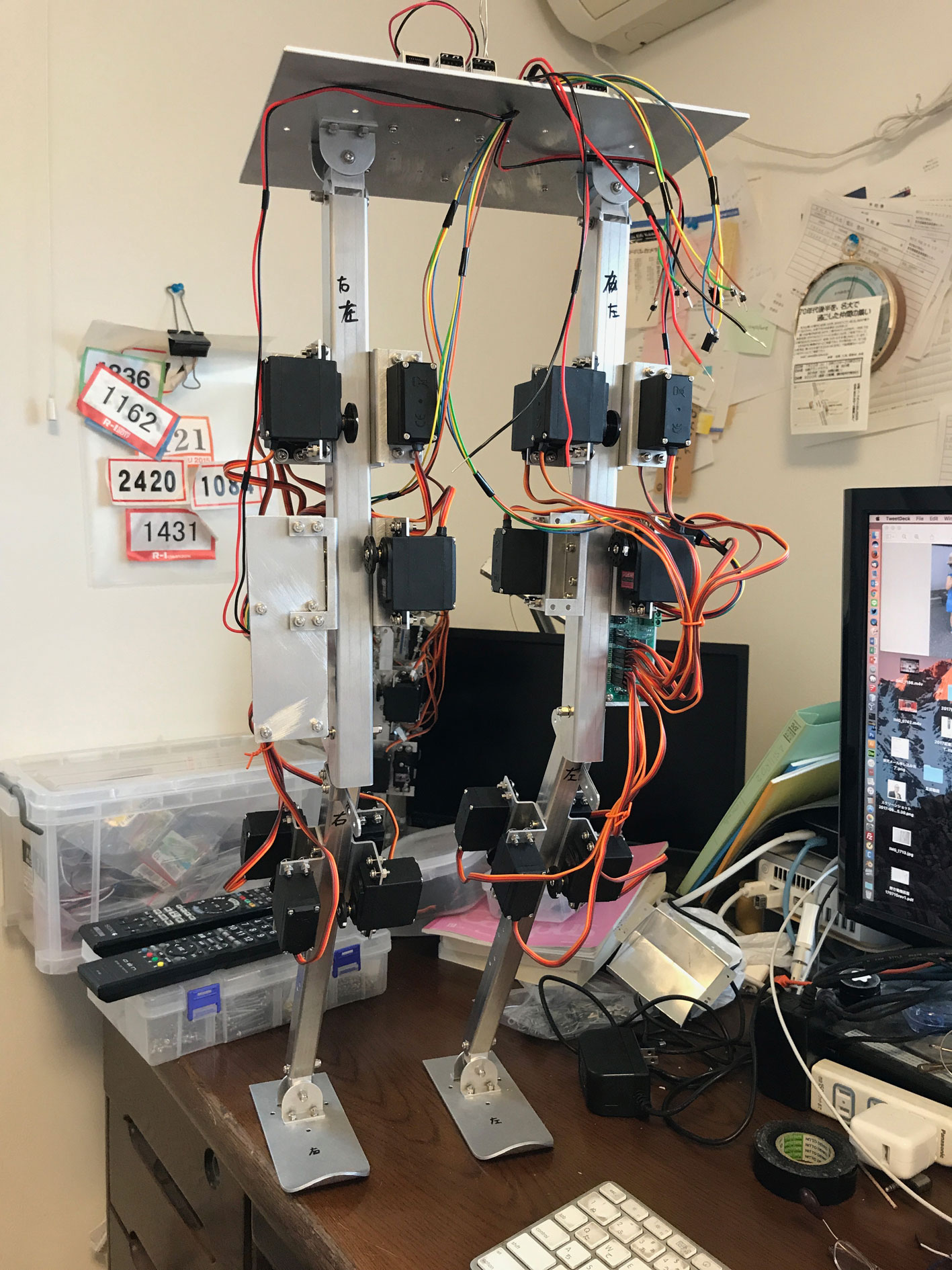
したがって、RaspberryPIそのものは、一つしか必要ないのだが、会話や知的な機能を担うために二台乗せてある。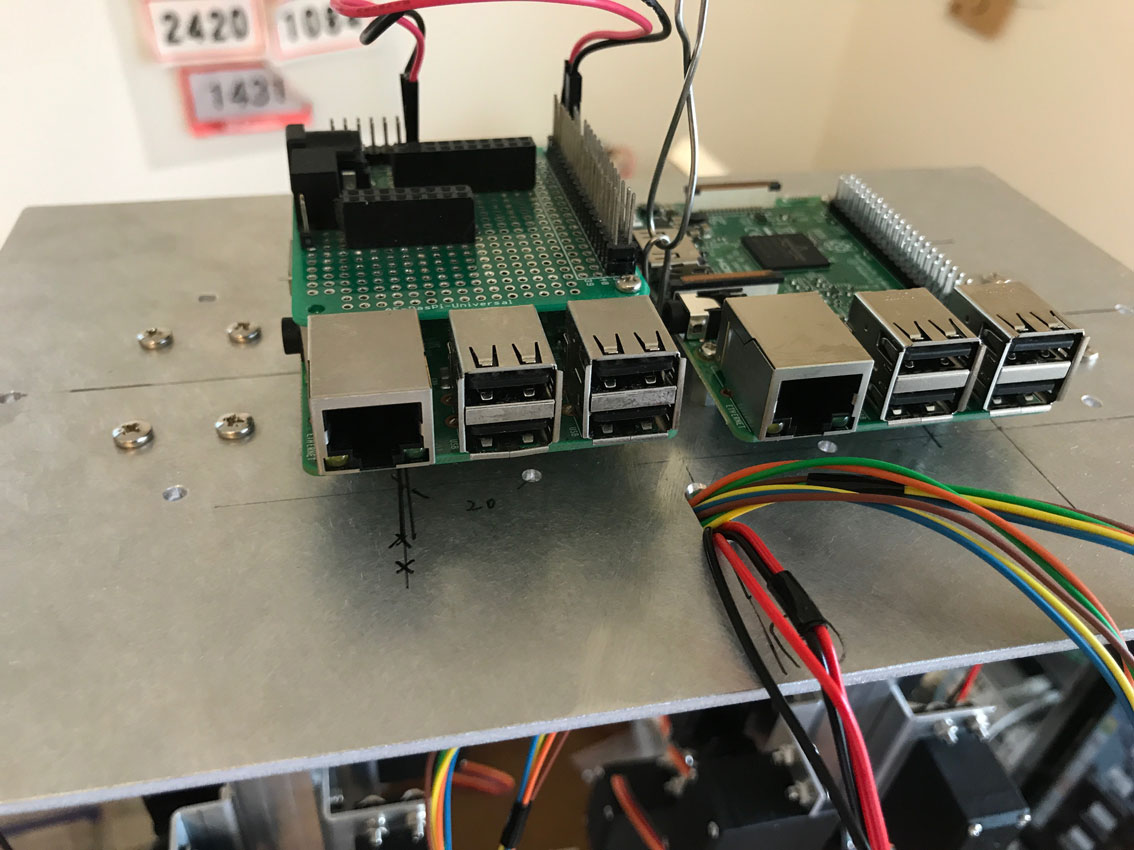
当面は一つしか動かさない。
電池ボックスを股間に設置するのだが、いったんRaspberryPI を外さないとつけれない。
そのあと、サーボと関節をつなぐワイヤーをセットすれば、動作に関する部分は終える。