現在考えているAIを軸としたロボット制御のイメージを少し書いておこう。
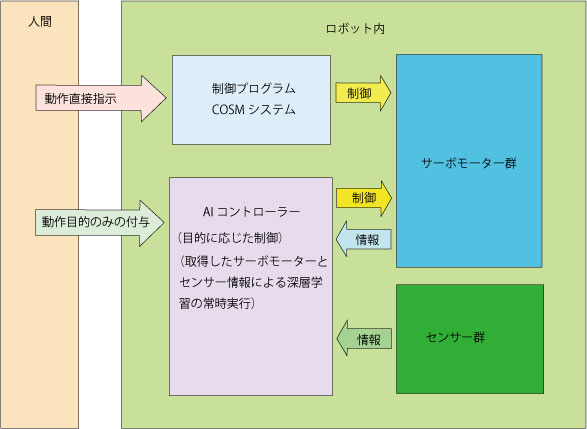 基本、歩く立つなどの目的を与えると、AIコントローラー自身がサーボモータを制御するようにシステムを作る。AIコントローラーは、サーボモーター角度群、センサー情報とその変化を取得して、自ら学習する。それらの情報は、人がCOSMを通してロボットを動かしている状況の中で取得する。
基本、歩く立つなどの目的を与えると、AIコントローラー自身がサーボモータを制御するようにシステムを作る。AIコントローラーは、サーボモーター角度群、センサー情報とその変化を取得して、自ら学習する。それらの情報は、人がCOSMを通してロボットを動かしている状況の中で取得する。
AIコントローラーは、モーターとセンサーの与えられた状況の中で、次のステップでサーボモータのどのような動きのパターンに持っていくのかをニューラルネットワークから出力して、それに基づいてサーボモーターが動く。
AIコントローラーのネットワークは、事前学習とともに、取得する情報に基づいて常時学習する。
学習には、動きの成功と失敗のイメージも学習に組み込む。