今日、ほぼ、丸1日、このことをやっていた。ほとんど進まなかったが、ここにきて光が差してきたので、これまでのことを記録しておく。
KXSD9-2050は、秋月電子のボードになったものだ。これは普通I2Cで使う。いや、これまで、使っていて、なかなかよく加速度を捉えていた。このブログの記事にもロボットの傾きを捉えているデータを何度も掲載してきた。なぜ今更、I2Cを諦めて、SPIでデータを取ろうとしているのか。理由は、I2Cは、サーボモータドライバのPCA9685でも動かしていて、それとどうにも相性が悪いようなのだ。使い方が悪いのかもしれないが。
特に、私としてはセンサーを別スレッドで常時動かして、ロボットの姿勢を監視していたい。揺れを最小限に抑えて、ロボットの早い歩行などに対応したいと思っていのだが、サーボとセンサを別スレッドで動かして、mutexでI2cに片側しかアクセスできないようにロックしても、サーボの角度設定にエラーが出る。センサーが使っている間、サーボを待たせることができないような感じだ。詳しくはわからない。
そこで、センサーの方をI2Cを使わないで、他のGPIOピンからアクセスしたいと思った。そうすれば、二つのスレッドがそれぞれの機器にアクセスするのを許すだろうと思っているからだ。そうならない可能性もあるが、やってみなきゃわからない。
それが理由なのだ。
朝から、それに挑戦したのだが、SPIは、面倒臭い。配線からして分かりにくい。データのやり取りも複雑だ。いや、結局複雑に考えすぎたのかもしれない。
ネット上にそもそも情報が少ない。KXSD9-2050は、SPIでもできるが基本I2Cでやるものだろう。海外サイトも含めてまとまった情報がなかった。だから、今回と次回では、私の様な1日無駄にしてしまう人が少ない様に、親切に記録しておこうと思う。
さて、途中の数え切れない失敗は、省略して、今、うまくいった、いい感じのところだけを記録しておく。なんだか、当たり前の様なことになっているのだが、この当たり前にたどり着くまでの彷徨は、無駄ではなかったと思いたい。
仕様書にある配線図及び秋月電子のマニュアル回路図は次のようなものである。どちらかだけをみても、さっぱりわからないのだ。両方同時に見ないと。
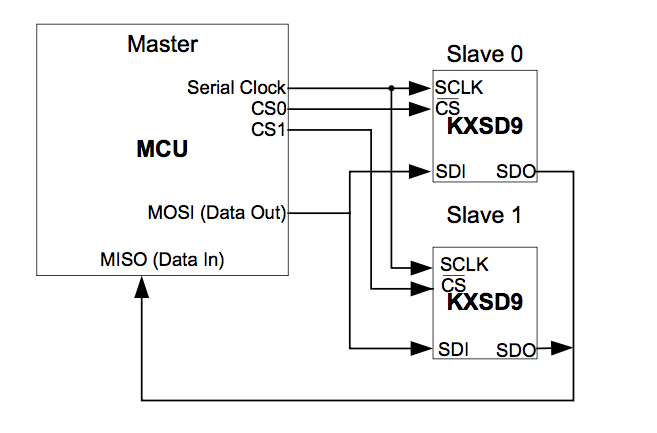
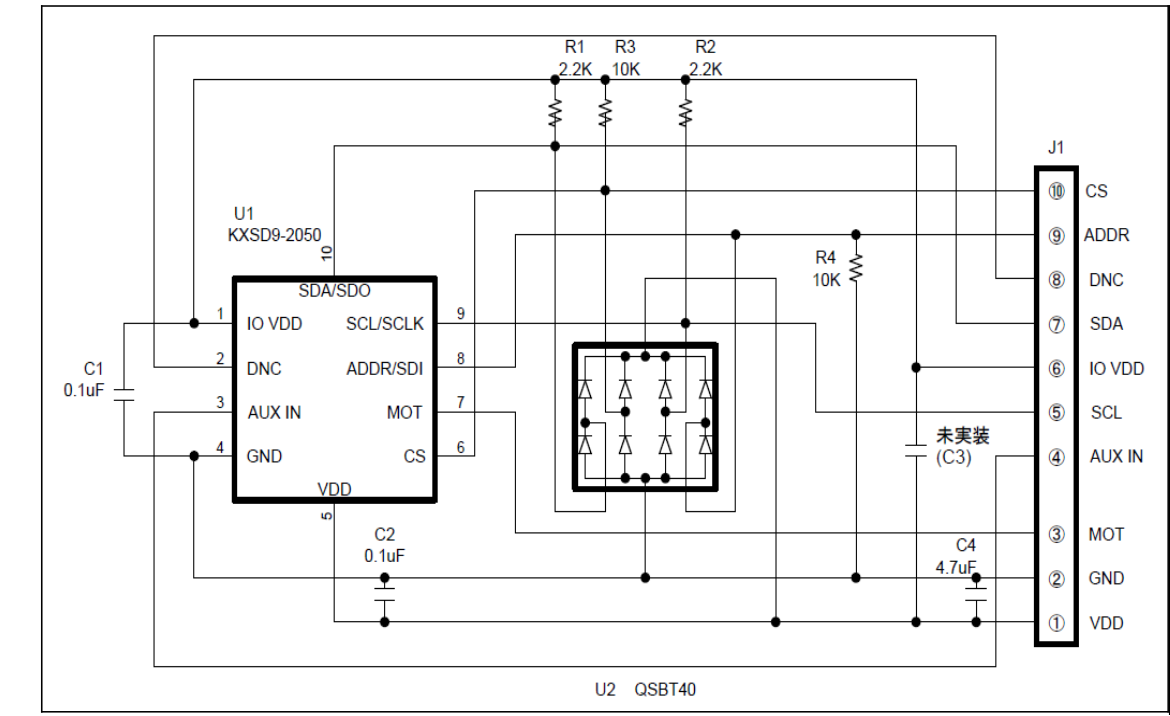 したがって、SPIの場合、(チャンネルゼロを使う)
したがって、SPIの場合、(チャンネルゼロを使う)
| KXSD9 | Rspberry PI 3 | |||
| SCLK | (ピン5) | → | SERIAL CLOCK | (GPIO 11) |
| CS | (ピン10) | → | CS0 | (GPIO 8) |
| SDO | (ピン7) | → | MISO | (GPIO 9) |
| SDI | (ピン9) | → | MOSI | (GPIO 10) |
| (ピン1とピン6) | → | 3.3V電源 | ||
| (ピン2) | → | GND |
となる。この辺りでも相当時間かかった!!(記録上はこれが一番大事。あとで、配線どうだったかなと、必ずこの記事を見ると思う)
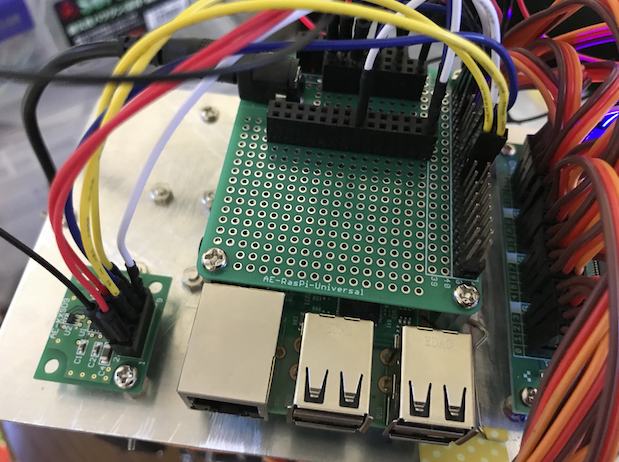
配線の実際はこの様になっている。RaspberryPIの基盤の上に、専用の追加基盤がはめてある。黄色が2本使ってあって醜いが、線の色不足である。
続いて、プログラムである。配線にも自信がないときには、プログラムのせいでダメなのか、配線がダメなのか、そもそもボードが壊れているのか、あらゆることに疑いが出たが。なんとかなった。
プログラムについては、次回まとめて書く。