逆振り子ロボットに、いろいろな転倒をさせてみた。あるいは、転倒の回避を試みた。数え切れないほどやったが、その一部を書いておきたい。
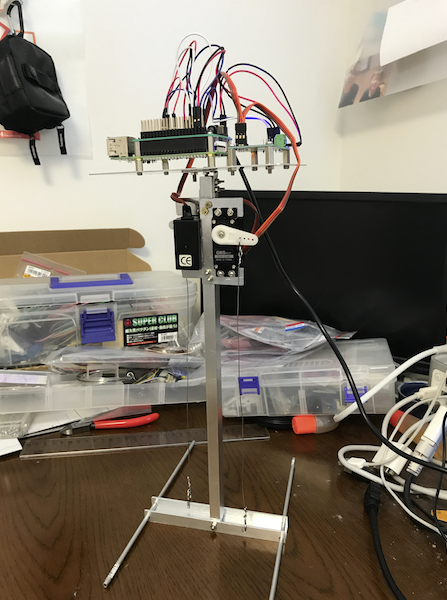
逆振り子ロボットアイコメ01の雄姿(笑)は左のようなものだ。写真では、左右方向にだけ倒れるように作ってある。足先に向けて、2台のサーボのワイヤーが張ってあるので、これを張ったり緩めたりして転倒させたり、転倒を制御させたりしている。
写真は、サーボ角度をほぼニュートラルにちかい位置にして直立させている。
サーボを緩めて、自然転倒させた時の3軸加速度センサーが捉えるデータを示しておこう。
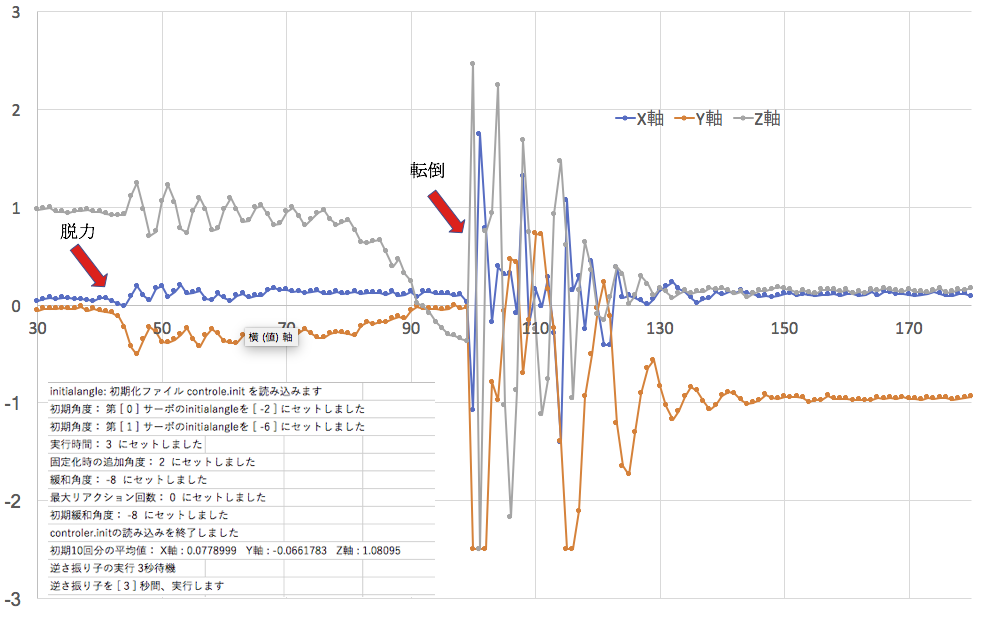
横軸の目盛りは10ミリ秒単位で、センサーから撮ってきたデータの番号である。縦軸は上から順に、Z、X、Y軸の加速度センサーのデータである。
Z軸は、垂直方向であるが、サーボの脱力によって上下の微妙な揺れが生じるが、倒れるに従ってそれは減衰している。青がX軸だが、倒れないようになっている方向のため、微妙な揺れだけにとどまっている。一番下のY軸のデータが、倒れる方向のものだ。ただ、ゼロから、一挙に(回転方向である負の方向に)上昇するが、倒れるに従ってまたゼロに戻っていっている。回転に従ってこの方向の動きがなくなるからである。倒れた瞬間に、加速度センサーはパニックになる。
このパニック状態は、ロボットが一番不快な状態になっていると考えれば良い。これは、のちに、ロボットに運動を学習させるときに、不快感のシグナルとして使いたいと思っている。
衝撃が治ると、Y軸が垂直になっているので、1g(gは重力加速度)になって、他はほぼゼロになっている。わずかの傾きがあるくらいだ。
次に、転倒をロボット自身んが検知した瞬間(0.1gの変化)、転倒する反対側のサーボを、角度を縮める形で固定した。すなわち、逆方向に揺り戻そうと動かした時の反応は、次のようになる。
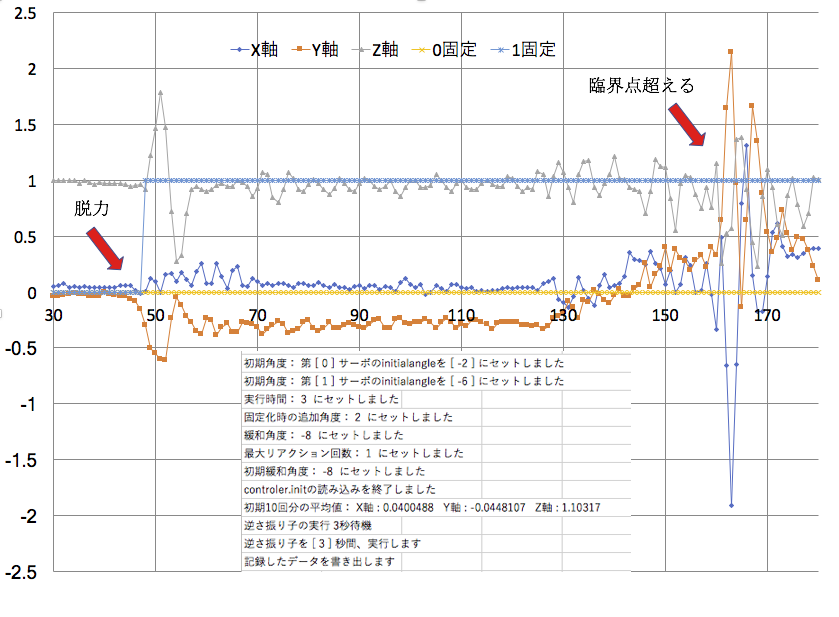 まず、Z軸が、脱力と片側固定化の、一瞬の大きな揺れの後、1gを維持している。先の完全転倒の場合と比べて、水平状態がほぼ維持されていることを意味している。それでもわずかに左に傾いていることは、Y軸の動きによって知ることができる。それが一見安定しているようだが、脱力から0.8秒後に反対側に向かっての回転が発生して、矢印のところで臨界点を超える。この臨界点を超えるというのは、データからの判断ではなく、ロボットを見ていた私が、これは、ほっておけば倒れると判断したところで、私がその時点でロボットを支えた。
まず、Z軸が、脱力と片側固定化の、一瞬の大きな揺れの後、1gを維持している。先の完全転倒の場合と比べて、水平状態がほぼ維持されていることを意味している。それでもわずかに左に傾いていることは、Y軸の動きによって知ることができる。それが一見安定しているようだが、脱力から0.8秒後に反対側に向かっての回転が発生して、矢印のところで臨界点を超える。この臨界点を超えるというのは、データからの判断ではなく、ロボットを見ていた私が、これは、ほっておけば倒れると判断したところで、私がその時点でロボットを支えた。
最初の転倒方向への完全転倒は避けれたのだが、逆のサーボが引き戻したことによって、逆側に倒れてしまう事態になったというわけである。