先の記事で作成したポーズデータ(50センチ歩行の110セットのデータ)を使って、Choregrapheのバーチャルロボットでシミュレーションしてみた。ほぼ、きちんと歩行を再現している。
左下に実行しているポーズデータのログが出力されている。
次に生ロボットでうまくいくかどうかを試してみる。そうすれば、スピードが実際どうなるか、変えることができるかどうかがわかるだろう。
先の記事で作成したポーズデータ(50センチ歩行の110セットのデータ)を使って、Choregrapheのバーチャルロボットでシミュレーションしてみた。ほぼ、きちんと歩行を再現している。
左下に実行しているポーズデータのログが出力されている。
次に生ロボットでうまくいくかどうかを試してみる。そうすれば、スピードが実際どうなるか、変えることができるかどうかがわかるだろう。
サリーにキレキレのダンスを踊らせたいと思っている。Youtubeにも上がっているが、それは手の動きが中心で足はただゆっくりと動かしている。それでは、人を惹きつけられない。できれば、ジャンプしたり、ランニングマンなど、最低できなければならない。できるとは確信持てないが、NAOについているモータは相当性能が良いので、うまくコントロールできれば、そして、足の裏などが耐久性を持っていれば、できる可能性があるかもしれないと思う。
そのために、NAOの運動能力を徹底的に調べようと思った。その手始めに、プレインストールされている、NAOの二足歩行を調べる。NAOには、26個の関節があり、まず、歩行時にこの関節がどう動いているのかを調べた。NAOの歩行は、安全のためだと思うが、遅すぎる。尺を取りすぎて、ネタに組み込めないという弱点がある。もっともっと早く歩かせたいのだ。できると思う。調べた結果は以下の通りである。(パソコンから、pythonのnaoqi sdkを使って、ロボットのnaoqiにつなげて、関節データを取得するAPIを使用した)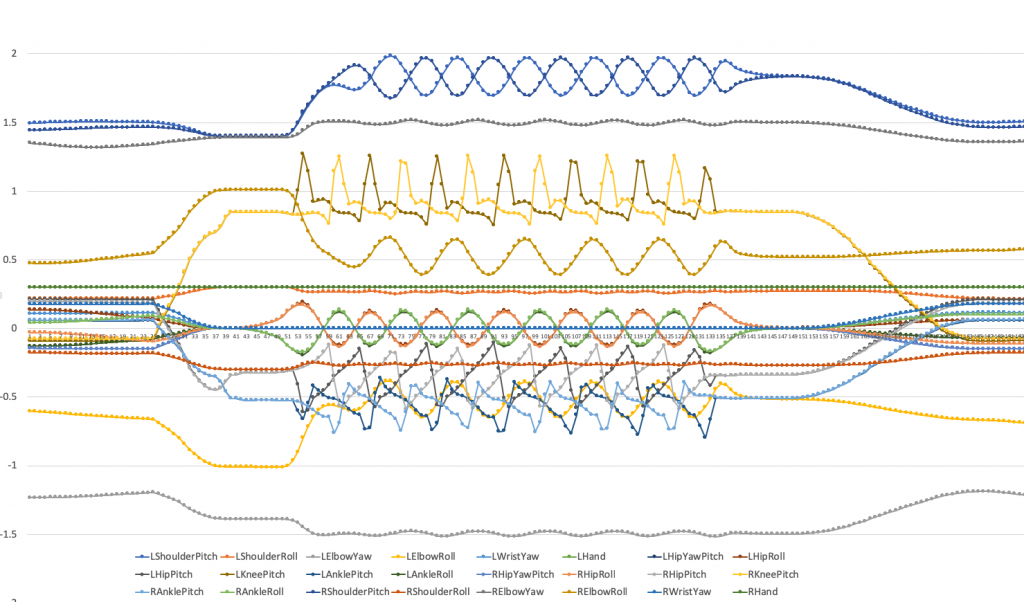
見ての通り、歩行前の静止状態から、歩行準備態勢に入り、歩行(約50センチメートル)、そして、歩行終了の態勢から静止状態に入るプロセスの関節状態である。データは、50ミリ秒ごとにとっている。頭を動かす二つの関節(ピッチとロール)は、ほとんど動いていないので、外している。縦軸の数値は、ラディアンで見た角度である。0度の位置は、事前に決まっている。静止状態で、まっすぐに立って、両手をまっすぐ前に出した状態が、全ての関節が0度になっている状態である(下図を参照)。実際のモータの組み込み状況がわからなければイメージできないと思うが。
上から見ていこう。
(1)1番上の交互に動いているのは、左右の肩の、前後の揺らしである。手を振りながら歩いているのである。
(2)3番目は、肘の縦方向への回転である。ほとんど動かしていない。
(3)次の鋸の刃のような二つのデータは、膝の折りたたみである。0.2秒で1パルスの動きをして、非常に急で細かい。
(4)6番目の黄土色の上下のカーブは、右肘のRoll、人間では、大きく動く方向への変化である。これに対する左肘の動きは、下から2とか3番目にあるオレンジの曲線である。
(5)その下の鶯色とオレンジ色の水平な線は、肩の縦方向の回転と指の動きで関係ない感じだ。
(6)その下のオレンジと緑の綺麗な対照的な動きは、緑が右肘の動きで、オレンジが右の股関節の左右の動きである。
(7)その下の大きな鋸の歯のような動きは、二つの足の股関節の前後の動きである。
(8)一番下の鋸の歯型の動きは、くるぶしの動きである。
一つ気になったところは、歩行の終わり方である。なだらからに終わっていくかと思ったら、かなり唐突に動きを止めている感じである。
このアングルデータは、全て、Choregrapheのポーズデータに変換でき、それら一連のポーズをロボットに再現するモジュールをC++で作ってあるので、この歩行をほぼそのままNAOに再現させることができる。その動きは、再現するスピードを自由に変えることができるので、どこまで早くすることができるのか、さらには、早くするとき、何を調整すれば安定するのかを調べていきたい。