RobotShopで16,000円以上もする距離センサーLidar Lite v3を購入した。
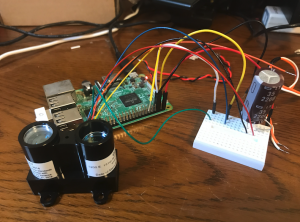
I2Sで動かそうとしたのだが、ネット上のプログラムでは動かなかった。理由はわからない。そこで、pi4jライブラリを使ってjavaで動かすプログラムを作成したら、すんなり動いてくれた。
ここに公開しておく。(こちらのpythonプログラムを参考にさせていただいた)
import com.pi4j.io.i2c.I2CBus; import com.pi4j.io.i2c.I2CDevice; import com.pi4j.io.i2c.I2CFactory; import java.io.IOException; import java.util.logging.Level; import java.util.logging.Logger; /** * * @author washida */ public class LidarLiteV3 { public static final int LIDAR_LITE_ADDR = 0x62; // address pin not connected (FLOATING) public static final byte ACQ_COMMAND = (byte) 0x00; public static final byte STATUS = (byte) 0x01; public static final byte FULL_DELAY_HIGH = (byte) 0x0f; public static final byte FULL_DELAY_LOW = (byte) 0x10; /** * @param args * @throws com.pi4j.io.i2c.I2CFactory.UnsupportedBusNumberException * @throws java.io.IOException */ public static void main(String[] args) throws I2CFactory.UnsupportedBusNumberException, IOException { I2CBus i2c = I2CFactory.getInstance(I2CBus.BUS_1); I2CDevice device = i2c.getDevice(LIDAR_LITE_ADDR); while (true) { int response = device.read(0x04); device.write(ACQ_COMMAND, (byte) response); try { Thread.sleep(500); } catch (InterruptedException ex) { Logger.getLogger(LidarLiteV3.class.getName()).log(Level.SEVERE, null, ex); } int value = device.read(STATUS); while ((value & 0x01) == 1) { value = device.read(STATUS); } int high = device.read(FULL_DELAY_HIGH); int low = device.read(FULL_DELAY_LOW); int val = (high << 8) + low; int dist = val; try { Thread.sleep(1000); } catch (InterruptedException ex) { Logger.getLogger(LidarLiteV3.class.getName()).log(Level.SEVERE, null, ex); } } } }