なぜロボットに二足歩行をさせるのか?
単純に考えれば、人が二足歩行しているからそれを真似させるということだ。見る側も、ロボットが四足歩行をしているよりも、二足歩行をしている方が、自分に対する親近感、共感を覚えやすいから、惹きつけられる。それを期待しているわけだ。
単なる移動であれば、四足歩行でも、多足歩行でも良いような気がする。
しかし、逆振り子型の二足歩行にこだわっていると、二足歩行には別の意味があるように思える。移動には、二足歩行の方が、他の多足歩行よりも簡便であり、省エネルギーなのではないかということだ。
モアイの移動を、逆振り子でやっている動画を先にお見せした。逆振り子は、あの深刻な重量のモアイ像をいとも簡単に移動させてしまう。
人間の歩行も、極めて省エネではないか。3足歩行はイメージがわかないが、四足歩行は、確かに安定している。チータは、確かに四足歩行で、100キロを超えるスピードを出す。それはすごい。しかし、二足歩行と四足歩行を同じ速さで、同じ重さで、測ったら、距離あたりのエネルギーは二足歩行の方が小さいのではないか?
そう思って検索したら、そういう研究論文がすでに発表されていることがわかった。
http://www.afpbb.com/articles/-/2255112?pid=1790817
二足歩行の必要エネルギーは四足歩行の四分の一というわけだ。
それが二足歩行への進化の要因だという考えには、批判もあるようだが、二足歩行が省エネルギーという事実が重要なのである。
やはりそうなのだ。予想は正しかった。つまり、ロボットの二足歩行へのこだわりは、省エネルギー型移動への模索という意味を持っている。
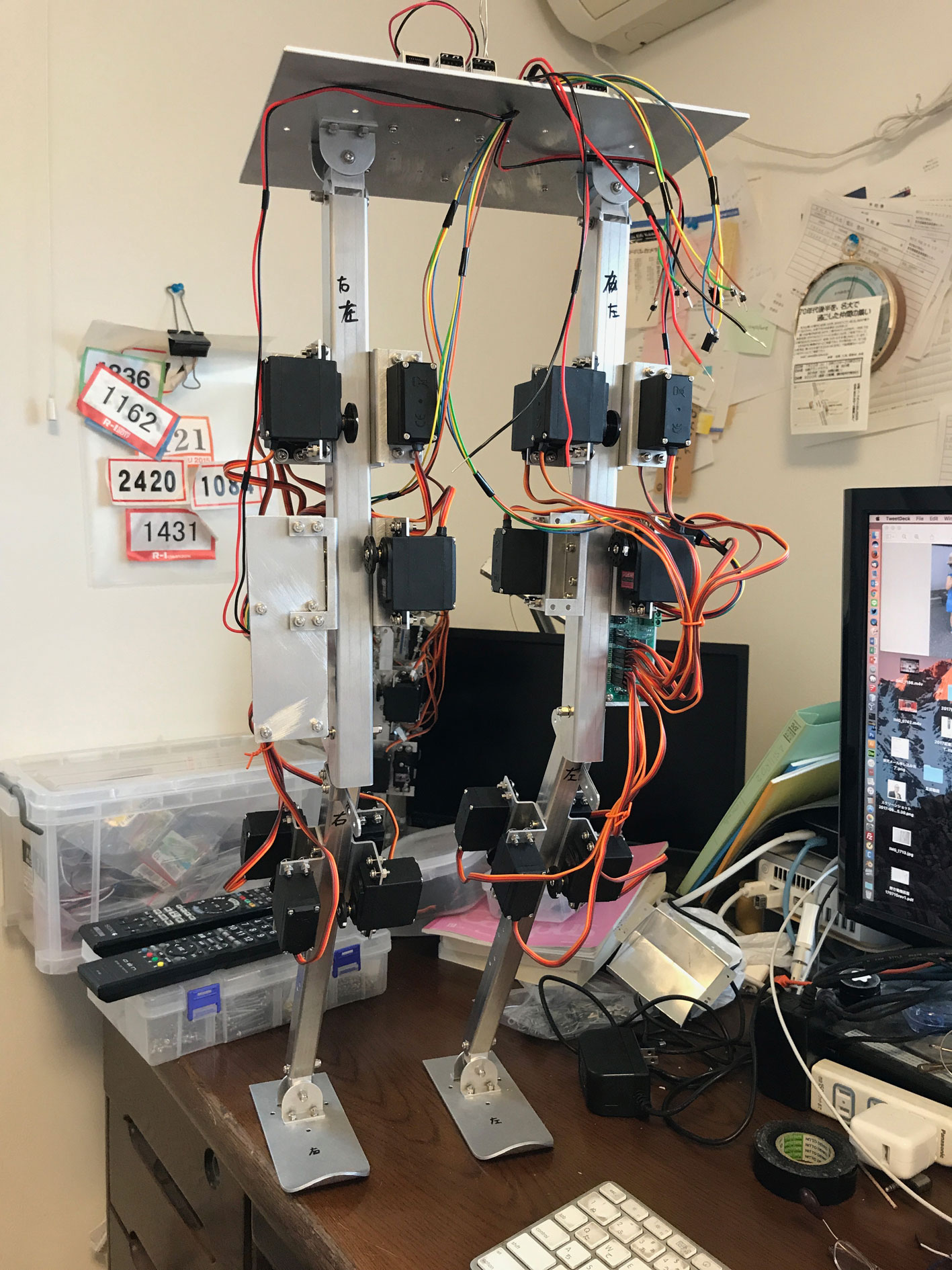
足郎2は今作っているところだが、足郎1でわかったのは、体を揺らして、ほんのわずかの前進操作をするだけで、歩み出すということだった。
足郎2が完成すれば、あの大きくて長い足が、いとも簡単に歩き出す様子をお見せできるはずだ。
NAOもそうだがホンダのASIMOも、その二足歩行は、人の動きを真似るためのただのパフォーマンスに見えて仕方がない。効率的移動という目的意識性を感じないのだ。
私は、このサイトに、逆振り子の理論から、足郎0(1本足ロボット)、足郎1と逆振り子型移動の理論とモデルを示してきた。この方向を、さらに徹底して追求していきたい。
日別: 2017年8月10日
足の配線完了
サーボドライバーボードのPCA-9685は片足それぞれについている。足郎1のように、上板上のコンピュータ側におくと配線が混雑してダメだからだ。ドライバーボードは16個のサーボモータを制御できるが、片足は10個しかついていない。この二つのボードは、RaspberryPIのI2Cの二つのポートを使う予定だ。RaspberryPIには、デフォルトでは1個のI2Cしか動かせないが、もともと2つついているのでその二つを動かす。
したがって、RaspberryPIそのものは、一つしか必要ないのだが、会話や知的な機能を担うために二台乗せてある。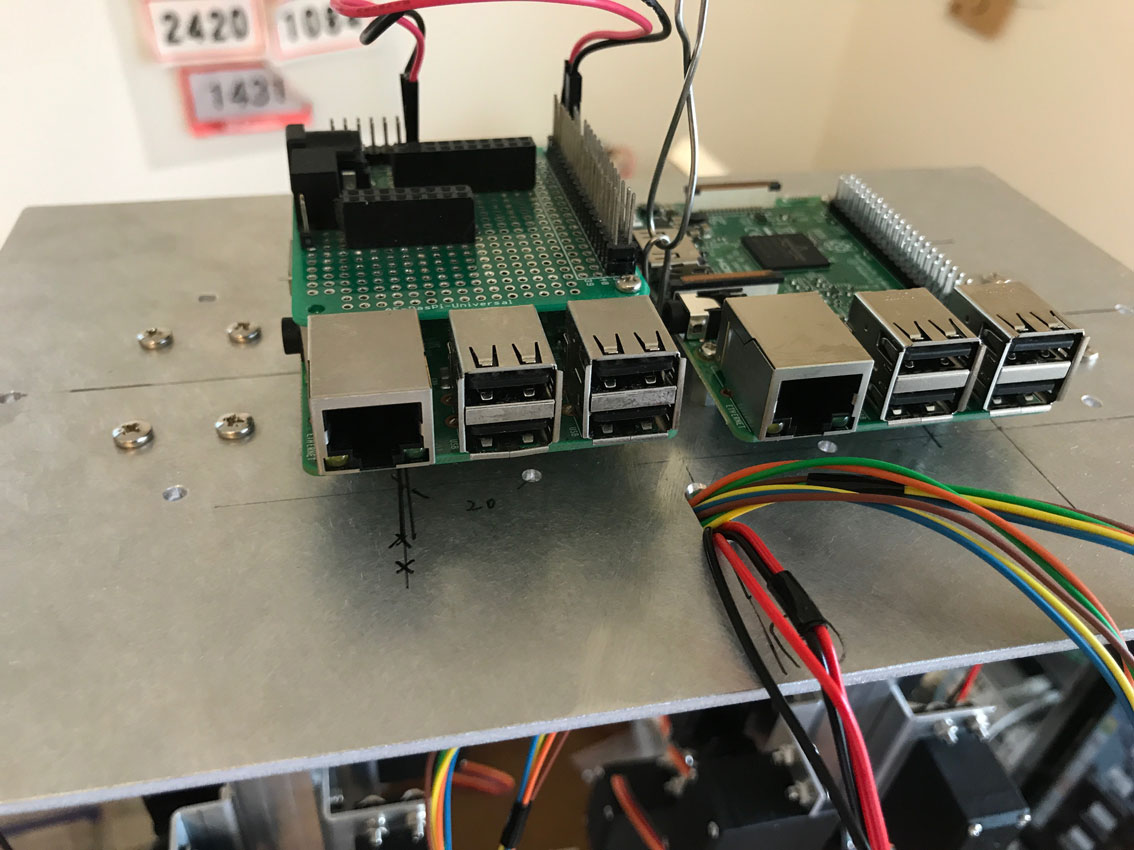
当面は一つしか動かさない。
電池ボックスを股間に設置するのだが、いったんRaspberryPI を外さないとつけれない。
そのあと、サーボと関節をつなぐワイヤーをセットすれば、動作に関する部分は終える。