足郎2には膝ができる。
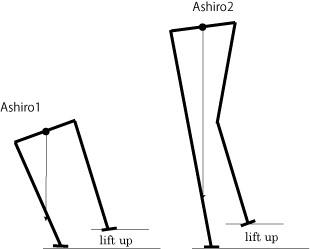 全体背が高くなることによって、傾き角度はそれほど大きくできなくて、また、大きくする必要もない。膝があるので、後ろに曲げることによって傾かずとも前後のための足上げが実現する。
全体背が高くなることによって、傾き角度はそれほど大きくできなくて、また、大きくする必要もない。膝があるので、後ろに曲げることによって傾かずとも前後のための足上げが実現する。
逆振り子の揺れも小さく済む。
それによって、左右の逆振り子を早く動かしても、勢いがつかない。足郎1では、大きく左右に揺らさなければならないので、早く動かすと勢いのために左右に倒れやすかった。それが少なくなるのが大きい。
すなわち、足郎2は素早い歩行が可能になるのである。ただ実際には、サーボの性能があるので、それほど早くは動かせない。何しろ1個600円のキワモノサーボであるから(笑)ただ、そのサーボで十分満足しているのだが。
そう見ると、固有振動という考え方は正しくないのかもしれないと思う。高くなると、固有振動はゆっくりになるからである。
基本、一方の側に揺れたとき、逆足の膝を曲げる動作を加える。さらに逆に揺れるときにその足を元に戻して伸ばす。これ以外の動作は、すべて足郎1と同じで良いはずだ。それで二足歩行ができる。
足郎1の二足歩行の最終版は、極めて単純な制御で実現できている。したがって、この足郎2もそれ以上の複雑な操作はいらないはずだ。
すでに足郎2の部品は業者の方でも設計が終わり、製作段階になっている。