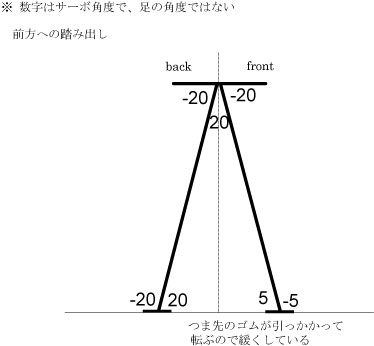
次の段階として、前への踏み出しをするようにして、二足歩行させてみた。
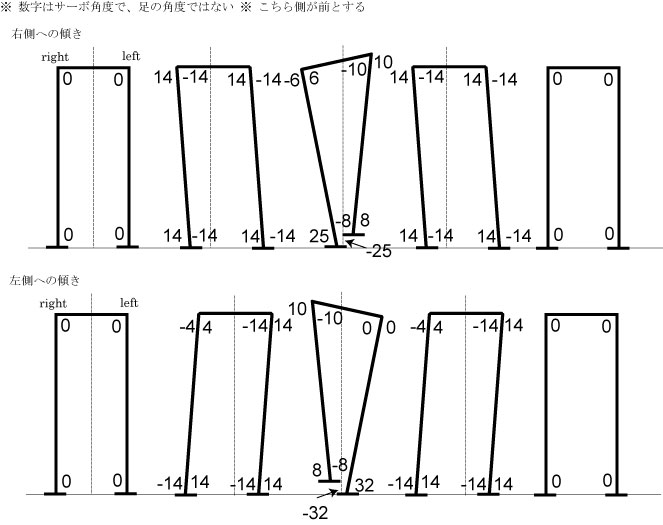
原理としては、二足歩行であるが、あまりに不恰好だ。膝がないために、足の折りたたみができないので、重心を片足に乗せて、重心のない方の足をしっかり釣り上げなければならず、負担が大きい(下記、サーボ角度図参照)。
二足歩行のために、足の裏に厚さ3ミリの天然ゴムを貼ったことを記しておこう。不要な回転を止めるためだが、役に立った。ただ、それでも回転は完全に止めきれていないが。これも、膝がないことが影響しているか。
サーボ16個フルに動かしているので、スピード感がなくなってきている。しかし、まだ、スピードを出す余裕はある。
サーボ角度図の最新版は次のようなものである。
動かすためのプログラムを以下に示しておく。プログラミングで、speedの設定を、stepsとintervalで定義するように文法を改訂している。次の文法改訂では、パラメータの演算、式の評価を入れて、さらに、センサーの制御も入れて、プログラミング言語らしくしたい。(Cosm: Controler Of ServoMOtor)
##############################
# 2017年5月18日 Toyoaki WASHIDA
# 2017年5月20日 ver.2.2
# 足郎1号の制御のためのプログラム
# 「二足歩行」
# 左右の揺れとともに前への踏み出しが入っている
# ファイル名: ashiro1-1.ibot
# '#'で始まる行はコメントになる
##############################
# 角度の定義、定義の名前、
# 定義の場合は、内容を { } 内に書き込む
# デリミタは基本、空白
# %で始まる定義やコマンドの順序は関係ない
# ただし、 { }内記述の順番は意味を持つ(順番の通り実行される)
# パラメーターは、サーボ角度の値(足の角度ではない)
# (注)現状で、上のサーボと下のサーボで方向が逆になっている
# スピード、delayの値で使うことが可能
# パラメーター使用時には'$'の接頭文字が必要
# 角度パラメーター
%param angle0 0
%param angle1 8
%param angle2 14
#%param angle3 16
%param angle3 22
%param angle4 6
%param -angle1 -8
%param -angle2 -14
#%param -angle3 -16
%param -angle3 -22
%param -angle4 -6
# 前へ踏み出す
%param angle5 20
%param -angle5 -20
# 前に出した足のつま先がつっかからないようにする
%param -angle5S -5
# 踏み出しを半分戻す
%param angle6 10
%param -angle6 -10
# スピード定義
# intervalは角度設定の合間に置くms
# stepsは、目的角度まで幾つ区切って進むか
# speedは両者とも定義されていなければエラーになる
# デフォルトはmidium
%defspeed fast {
interval:2
steps:10
}
%defspeed midium {
interval:6
steps:10
}
%defspeed slow {
interval:9
steps:10
}
# サーボ角度の定義集
# 直立状態
%defangles zerophaseSide {
# 左の項のサーボ名はシステム予約語
#
# 左右の動きに関わるサーボ
LeftUpperLeft:$angle0
LeftUpperRight:$angle0
LeftLowerRight:$angle0
LeftLowerLeft:$angle0
RightUpperRight:$angle0
RightUpperLeft:$angle0
RightLowerRight:$angle0
RightLowerLeft:$angle0
#
# 前後の動きに関わるサーボ
LeftUpperFront:$angle0
LeftUpperBack:$angle0
LeftLowerFront:$angle0
LeftLowerBack:$angle0
RightUpperFront:$angle0
RightUpperBack:$angle0
RightLowerFront:$angle0
RightLowerBack:$angle0
}
# 最初の一歩の前段階
# 右への傾きの第1段階、菱形に潰れる
%defangles rightphase1-pre {
RightUpperRight:$angle2
RightUpperLeft:$-angle2
RightLowerRight:$angle2
RightLowerLeft:$-angle2
LeftUpperLeft:$-angle2
LeftUpperRight:$angle2
LeftLowerLeft:$-angle2
LeftLowerRight:$angle2
# 前後の動きに関わるサーボ
# 不要と思われる
}
# 歩行中の
# 右への傾きの第1段階、菱形に潰れる
%defangles rightphase1 {
RightUpperRight:$angle2
RightUpperLeft:$-angle2
RightLowerRight:$angle2
RightLowerLeft:$-angle2
LeftUpperLeft:$-angle2
LeftUpperRight:$angle2
LeftLowerLeft:$-angle2
LeftLowerRight:$angle2
# 前後は半分くらい戻す
LeftUpperFront:$angle6
LeftUpperBack:$-angle6
LeftLowerFront:$angle6
LeftLowerBack:$-angle6
RightUpperFront:$-angle6
RightUpperBack:$angle6
RightLowerFront:$-angle6
RightLowerBack:$angle6
}
# 右への傾きの第2段階、
# 右足に重心を十分移動し、左足をできる限りあげる
%param angle3U 10
%param -angle3U -10
%defangles rightphase2 {
RightUpperRight:$-angle4
RightUpperLeft:$angle4
RightLowerRight:$angle3
RightLowerLeft:$-angle3
LeftUpperLeft:$angle3U
LeftUpperRight:$-angle3U
LeftLowerLeft:$angle1
LeftLowerRight:$-angle1
# 前後はここで真っ直ぐに戻す
LeftUpperFront:$angle0
LeftUpperBack:$angle0
LeftLowerFront:$angle0
LeftLowerBack:$angle0
RightUpperFront:$angle0
RightUpperBack:$angle0
RightLowerFront:$angle0
RightLowerBack:$angle0
}
# 右への傾きの第3段階、
# 左足を前に踏み出す
%defangles rightphase3 {
# 左右は揺れを直立に戻す
LeftUpperLeft:$angle0
LeftUpperRight:$angle0
LeftLowerRight:$angle0
LeftLowerLeft:$angle0
RightUpperRight:$angle0
RightUpperLeft:$angle0
RightLowerRight:$angle0
RightLowerLeft:$angle0
# (left)前に踏み出す 後ろ足(right)の送り
LeftUpperFront:$-angle5
LeftUpperBack:$angle5
LeftLowerFront:$-angle5S
LeftLowerBack:$angle5
RightUpperFront:$angle5
RightUpperBack:$-angle5
RightLowerFront:$angle5
RightLowerBack:$-angle5
}
# (改訂S:右足をあまり開かない)左への傾きの第1段階、菱形に潰れる
# angle2 は本来14
# パラメータはどこにおいても良いので
%param angle2S 4
%param -angle2S -4
%defangles leftphase1 {
LeftUpperLeft:$angle2
LeftUpperRight:$-angle2
LeftLowerLeft:$angle2
LeftLowerRight:$-angle2
# ここを変形
RightUpperRight:$-angle2S
RightUpperLeft:$angle2S
# ここまで
RightLowerRight:$-angle2
RightLowerLeft:$angle2
# 前後は半分くらい戻す
LeftUpperFront:$-angle6
LeftUpperBack:$angle6
LeftLowerFront:$-angle6
LeftLowerBack:$angle6
RightUpperFront:$angle6
RightUpperBack:$-angle6
RightLowerFront:$angle6
RightLowerBack:$-angle6
}
# (改訂S:)左への傾きの第2段階、
# 左足に重心を十分移動し、右足をできる限りあげる
# LeftLowerLeftをもっと引く
%param angle3S 32
%param -angle3S -32
%param angle4S 0
%param -angle4S 0
%param angle3T 10
%param -angle3T -10
%defangles leftphase2 {
LeftUpperLeft:$-angle4S
LeftUpperRight:$angle4S
# ここを変化させた
LeftLowerLeft:$angle3S
LeftLowerRight:$-angle3S
# ここまで
RightUpperRight:$angle3T
RightUpperLeft:$-angle3T
RightLowerRight:$angle1
RightLowerLeft:$-angle1
# 前後はここで真っ直ぐに戻す
LeftUpperFront:$angle0
LeftUpperBack:$angle0
LeftLowerFront:$angle0
LeftLowerBack:$angle0
RightUpperFront:$angle0
RightUpperBack:$angle0
RightLowerFront:$angle0
RightLowerBack:$angle0
}
# 左への傾きの第3段階、
# 右足を前に踏み出す
%defangles leftphase3 {
# 左右は揺れを直立に戻す
LeftUpperLeft:$angle0
LeftUpperRight:$angle0
LeftLowerRight:$angle0
LeftLowerLeft:$angle0
RightUpperRight:$angle0
RightUpperLeft:$angle0
RightLowerRight:$angle0
RightLowerLeft:$angle0
# (right)前に踏み出す 後ろ足(left)の送り
LeftUpperFront:$angle5
LeftUpperBack:$-angle5
LeftLowerFront:$angle5
LeftLowerBack:$-angle5
RightUpperFront:$-angle5
RightUpperBack:$angle5
RightLowerFront:$-angle5S
RightLowerBack:$angle5
}
# 実行の定義
# 使えるコマンドは今の所
# setAngle, speed, delay, stand, relax
# メインルーチンの定義
%defexec walk1 {
# この実行定義はループさせないで
# exec は、再帰的呼び出しを可能にするか
# 無限ループを避けなければならない
# 次のものは繰り返させる
# カンマの前後に空白を入れないこと
#
# まず、立たせる
stand:all
# 1000ms待機
delay:1000
# 最初の歩き出しは、前後を開いていないため、
# メインルーチンに入れておく
# 右に揺れ始める
speed:midium
setAngle:rightphase1-pre
# 歩行のサブルーチンに移動する
exec:walk2,3
# 実行が終了したら
# 立たせる
stand:all
}
# サブルーチンの定義
%defexec walk2 {
# 指定されたスピードは再指定がない限り有効
# 足を上げる
speed:midium
setAngle:rightphase2
setAngle:rightphase3
# 左に揺れ始める
speed:midium
setAngle:zerophaseSide
setAngle:leftphase1
# 足を上げる
speed:midium
setAngle:leftphase2
setAngle:leftphase3
# 右に揺れ始める
speed:midium
setAngle:zerophaseSide
setAngle:rightphase1
# 100ミリ秒待機
# delay:100
}
# 実行させる
# exec 実行コマンド
# walk1 定義されている実行内容名
# 1回だけ実行する
%exec walk1 1
######## 以上 ###########