センサーのでんげんが3.3Vなので、確かに、RaspberrPiからも取れるのだが、せっかく5V4アンペアの別電源を用意したのだから、そこから3.3Vを取り出そうと思って、DC-DCコンバーターM78AR033-0.5(380円)も買ってきた。取り付けたのだが、なんだか、ジャイロ用の電源が取り出せない。おかしいと思って、テスターで調べたら、なんと、極性が逆だった。元の、5Vから逆だったのだ。逆だったら、逆向きで降圧していた。ちょっと笑っちゃうね。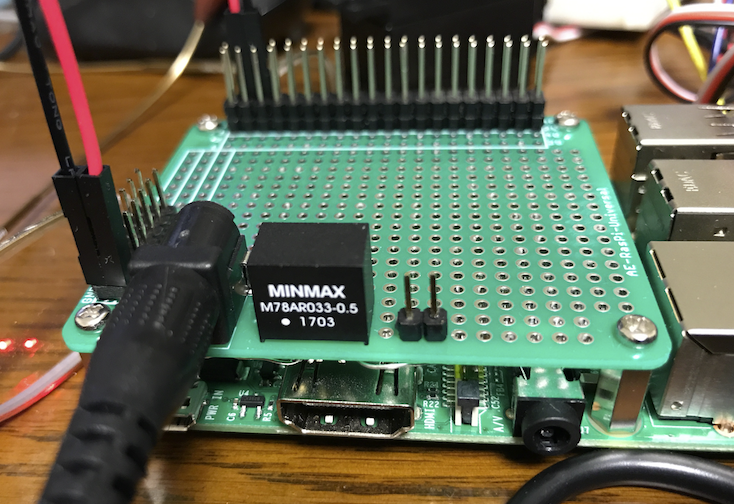
真ん中がデバイスで、裏側の配線で右の二つのピンに出しているが、プラスとマイナスが逆だった。
(その後、極性を正しく直した。ピンの左がGRNDで、みぎが3.3V。2017年4月22日)
日別: 2017年4月21日
RaspberryPiでサーボモーターを動かす
アキバで、サーボモーター(回転型)GWSS35STDを2機買ってきた。サーボモーターをチャンネルで動かすためのドライバボードPCA9685も買う。
モーターを動かすための別電源を用意した方がいいので、先日、RspberryPiの上に乗せるボードに5ボルト入力コネクタをつけれたので、これもまた先日買ってきた5V4アンペアの電源ユニットをつないで、そこから配線することにした。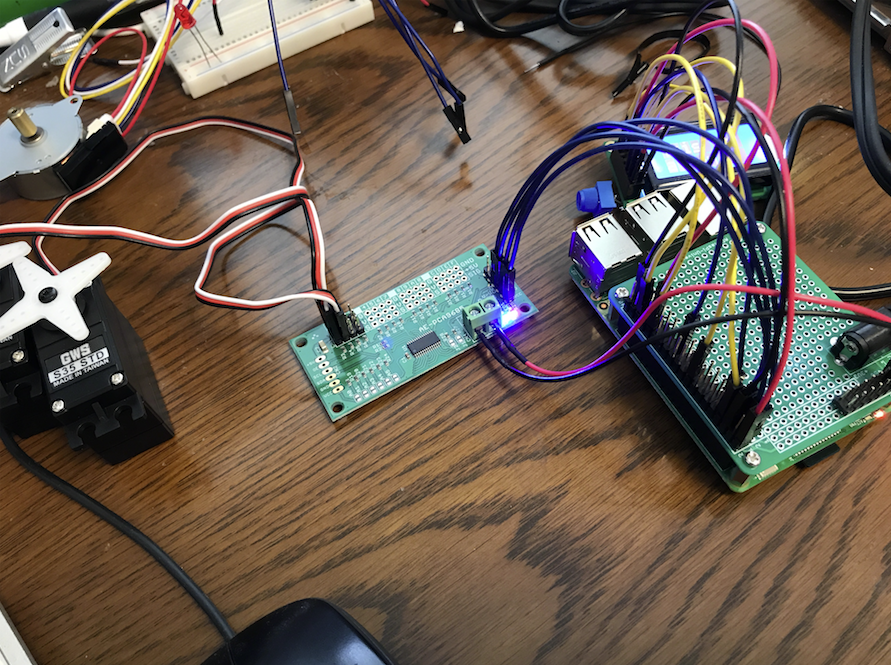
写真の右端にコネクタはつけてそこからドライバボードにつなげている。繋げると、LEDの青が光る。
ボードはこちらからみて、右側にRspberryPiのピンからの入力を入れる。そこは半田付けをコレクタに、ピンを刺している。
ボードの上側に、サーボからの3線入力をさす。ここでは、0チャンネルと1チャンネルの二つを使って2台を制御する。全部で16台繋げるが、最初の4つのコネクタしか半田付けしなかった。
電源は、付いたものを半田付けしたが、ネジで差し込んだ線を固く止めている。LEDの左側が電源だ。
配線とプログラムは、
http://qiita.com/shigeru-yokochi/items/ac2138feb74a7ef7ffc6
を参照させていただいた。ほとんどそのまま使えます。RaspberryPi2のピン配置だが、ここでつなぐピンに関しては、RaspberryPi3と同じなので。
それだけです。
ツイッターに動画を上げています。
RaspberryPiからサーボモーター2台を2チャンネル使って動かす。5V、4アンペアのモーター用電源をコンピュータの上に重ねたボードに入れ、そこからサーボドライバに引っぱった。
ちゃっちいサーボも動く。#RaspberryPi #PCA9685#GWSS35STD pic.twitter.com/X7OKQvcHKZ
— わっしー教授(ロボット即興芸) (@wassiisg) 2017年4月20日