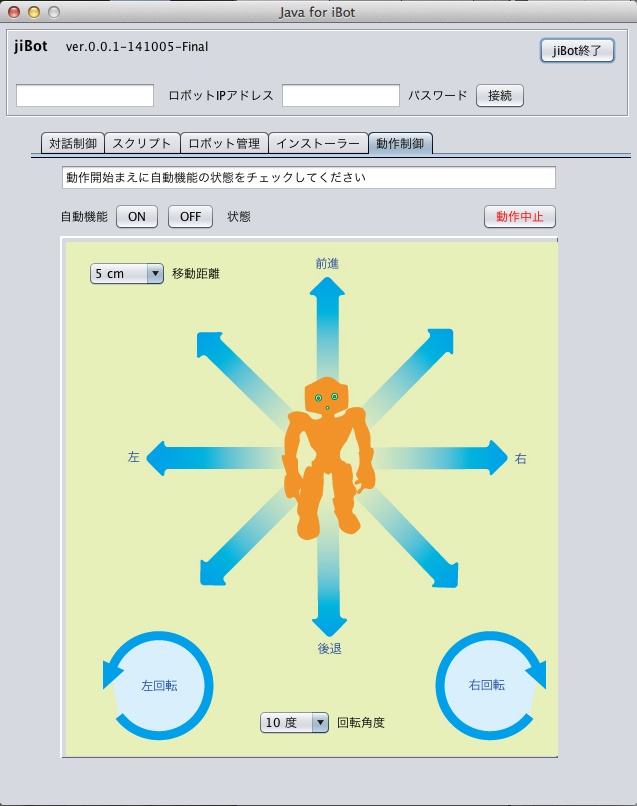
java用のqimessaging.jarを使って、対話管理(スクリプトの開始や表示)、動作制御(5cm〜90cmの移動、10度〜180度の回転)、状態把握(バッテリ、ディスク、メモリ、休息、起床、停止、再起動など)、ibotのインストール(モジュールのロボットへの組込み)などをこなす、jiBotのチェックが終わった。
※ このjiBotは、Pepperにたいしても使えるはずである。使用しているすべてのAPIがNAOとPepperとの共用のものだから。
予定通り稼働した。先にビデオで示した、口頭による動作プログラム(長い距離:0.5m〜10m程度まで移動制御できる)とあわせれば、ほぼ、指定場所に、リモートでロボットをセットでき、対話の制御、また、ibotクラウドにつながらなくても、ibotモジュールの制御ができるようになった。
※ クリックすると原寸表示
(ロボットを含むローカルネットへの接続は必須:macとlinuxでは問題なく動く。Windowsについては、32ビットバージョンで稼働する。)
日別: 2014年10月6日
瀬名秀明氏の『ロボット学論集』を読む
分厚い本なので、じっくり読んだというよりも、猛烈な速さで斜め読みした感じだが、面白かった。いろいろ印象に残った点はある。が、二つだけあげておこう。(1)なぜヒーマノイドでなければならないのか、アシモフは、社会自体が人間の身体性にあわせてデザインされているから、汎用性を持っていた方が経済的、と言ったそうだ。
その点で、私が一番注目したのは、どこに書かれていたかは忘れたが、身体的共感性である(そんな意味ではなかったかもしれない)。ロボットに手があれば、われわれはそれを自分の手と同じように感じ、万が一ロボットの手が壊れれば、自分の痛さや不便さを感覚的に再現できる。
(2)瀬名氏が書いている最後のところにある次の部分に刺激を受けた。
「つくる側がすべきことは何か。それは自分の面白いと思うことをロボットに実装させてゆくことである」