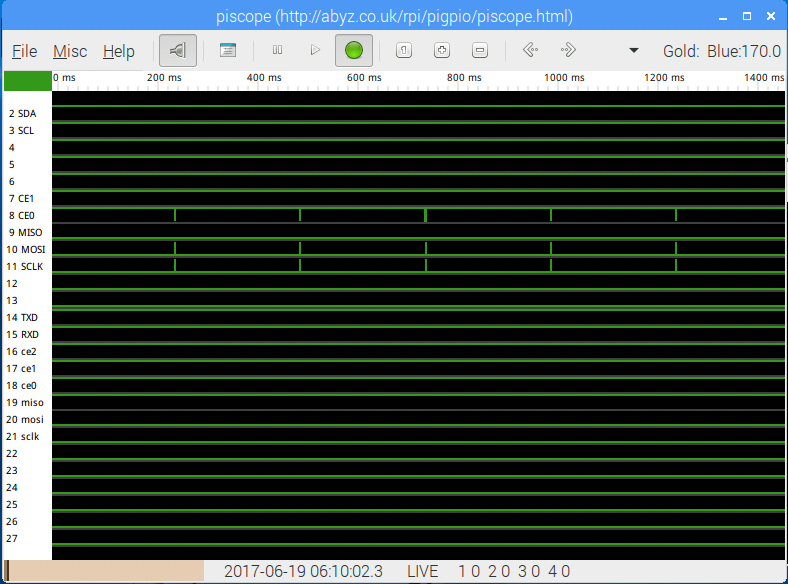
Piscopeという便利なツールがあって、Raspberrypiのgpioを常時監視できる。
http://abyz.co.uk/rpi/pigpio/piscope.html
これで見ても、Spi0のクロックとMOSI, MISOの活動はみれるが、Spi1は、全く反応していない。
カテゴリー: ロボット製作
40年ぶりのオシロスコープ、SPI1の有効化問題
RaspberryPI3(以下RPI)のSPI通信で、加速度センサーを5個ぶら下げたいのだが、うまくいかないのでここ2、3日呻吟している。
そう言うことで、RPIのgpioピンから出ているパルスをどうしても確かめたくて、前から、必要だと思っていたオシロスコープを秋月電子で買ってきた。SDS5032Eだ。Amazonのそれと値段がほぼ同じなので、秋月電子でもでいいだろうと直接買ったわけだ。
オシロスコープは40年ぶりである。名古屋大学の工学部(電気工学科、内容は情報工学。というのも当時は情報工学科がなかった)の学生だったとき触って以来だった。当時の機械は、数百万円したのではないかと思う。今日、買ってきたのは、3万1千円だった。それでも高いが、性能はこちらの方がいいのだろう。当時はアナログで、それも良かった。
オシロスコープの使い方など、とっくの昔に忘れてしまったが、youtubeの動画をいくつか見たらすぐに勘を取り戻した。昔やっていたから、買ってくればなんとか使えるようになると言う自信があった。大学の教育も、こう言う意味で、役に立つ。ただ、当時は、真面目に勉強しない、半ば落ちこぼれていた劣等生だったが(笑)実験・実習は必修だったので、サボれなかった。
SPI0のSCLKピンを調べるとちゃんとクロックパルスが出ていた。
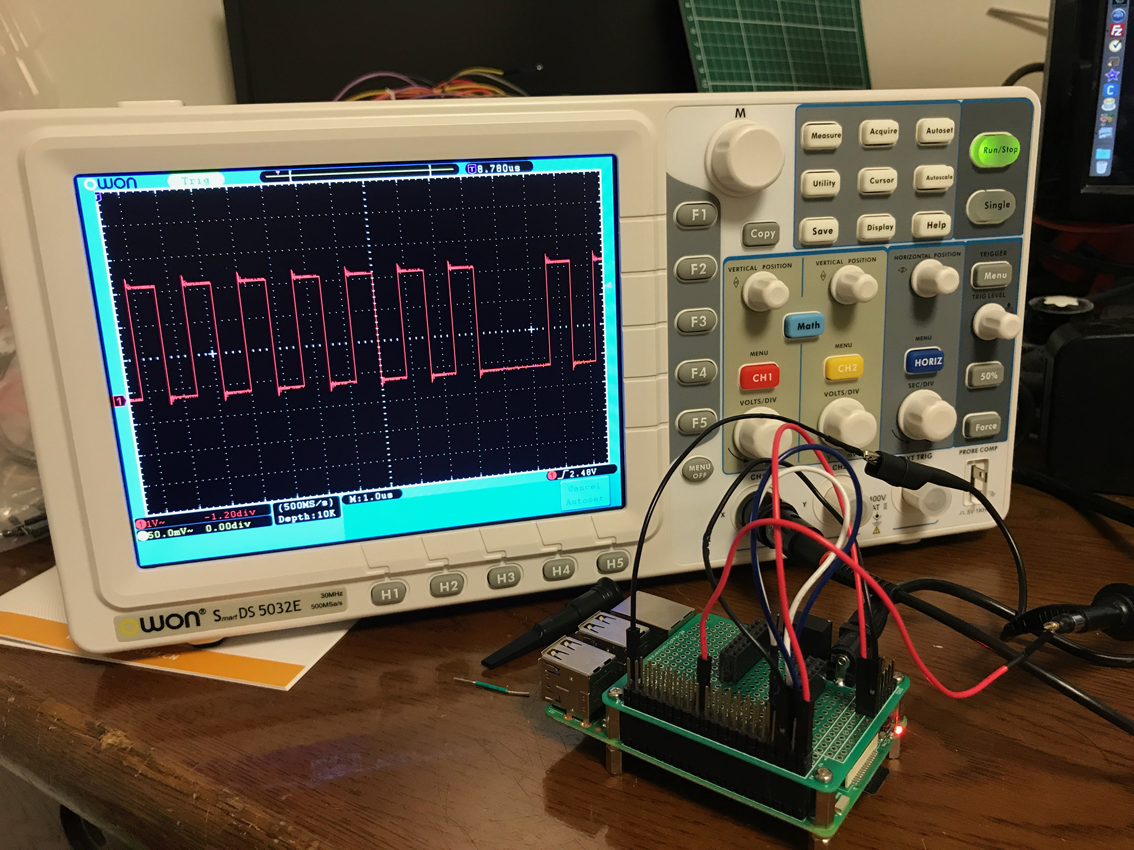 一方、SPI1のクロックは、40番ピンなのだが、信号が出ていない(泣)。
一方、SPI1のクロックは、40番ピンなのだが、信号が出ていない(泣)。
事前の設定はちゃんとやっている。/boot/config.txt に、次のような設定を書き加えて、rebootしている。
# SPI1 activated
dtoverlay=pi3-disable-bt
dtoverlay=spi1-3cs
bluetoothを無効にしているし、spi1の有効化を指示している。結果的に、
$ ls -l /dev/sp*
crw-rw---- 1 root spi 153, 3 6月 18 20:55 /dev/spidev0.0
crw-rw---- 1 root spi 153, 4 6月 18 20:55 /dev/spidev0.1
crw-rw---- 1 root spi 153, 2 6月 18 20:55 /dev/spidev1.0
crw-rw---- 1 root spi 153, 1 6月 18 20:55 /dev/spidev1.1
crw-rw---- 1 root spi 153, 0 6月 18 20:55 /dev/spidev1.2
で、デバイスの有効化は確認できている。
Spi1のMOSIピンは、38番ピン、MISOピンは35番ピン、両者を直結して、
pythonで、
----------------------
>>> import spidev
>>> spi = spidev.SpiDev()
>>> spi.open(0, 0)
>>> spi.max_speed_hz = 1000000
>>> spi.xfer([0x02])
[0]
>>> spi.xfer([0x1])
[0]
>>> spi.open(1, 0)
>>> spi.max_speed_hz = 1000000
>>> spi.xfer([0x1])
[1]
>>> spi.xfer([0x2])
[2]
--------------------------
と言うようなことをやった。後半部分は、SPI1に関する操作だ、ちゃんと値を返している。
SPIというのは、基本、玉突きデータ送信で、MOSIで、マスター(ここでは、RPI)からデータを送り出すと、MISOでスレーブ(末端デバイス)から送り出されてきたデータを受け取るという仕組みである。したがって直結すると、デバイスはないが、マスター自身から送り出されたものをマスター自身が受け取るということになる。上記では、それをやっているわけで、前半のSPI0は、直結線がないので、何も受け取らないが、後半のSPI1の方は、直結しているので、ちゃんと送り出したデータをそのまま受け取っている。
このデータの送受信をSCLKから出るクロックパルスに基づいて同期化させているのだが、そのパルスが出ていなかったら、うまくいくわけがない。
そうしてだろう???
圧力センサーの装着とデータ
Warning: fopen(/data/htdocs/ibot/wpibot//wp-content/plugins/latex/cache/tex_dfa7cc7dcb24dcc08921d96fa0a23e9b.gif): failed to open stream: Permission denied in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 123
Warning: fputs() expects parameter 1 to be resource, bool given in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 124
Warning: fclose() expects parameter 1 to be resource, bool given in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 126
Warning: getimagesize(/data/htdocs/ibot/wpibot//wp-content/plugins/latex/cache/tex_dfa7cc7dcb24dcc08921d96fa0a23e9b.gif): failed to open stream: No such file or directory in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 129
Warning: preg_replace(): The /e modifier is no longer supported, use preg_replace_callback instead in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 47
Warning: preg_replace(): The /e modifier is no longer supported, use preg_replace_callback instead in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 49
Warning: fopen(/data/htdocs/ibot/wpibot//wp-content/plugins/latex/cache/tex_dcd91e63b5cfbea0e04e9269466ff3b9.gif): failed to open stream: Permission denied in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 123
Warning: fputs() expects parameter 1 to be resource, bool given in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 124
Warning: fclose() expects parameter 1 to be resource, bool given in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 126
Warning: getimagesize(/data/htdocs/ibot/wpibot//wp-content/plugins/latex/cache/tex_dcd91e63b5cfbea0e04e9269466ff3b9.gif): failed to open stream: No such file or directory in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 129
Warning: preg_replace(): The /e modifier is no longer supported, use preg_replace_callback instead in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 47
Warning: preg_replace(): The /e modifier is no longer supported, use preg_replace_callback instead in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 49
Warning: fopen(/data/htdocs/ibot/wpibot//wp-content/plugins/latex/cache/tex_098d6f3c14c170fc07b67bdabfdfc304.gif): failed to open stream: Permission denied in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 123
Warning: fputs() expects parameter 1 to be resource, bool given in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 124
Warning: fclose() expects parameter 1 to be resource, bool given in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 126
Warning: getimagesize(/data/htdocs/ibot/wpibot//wp-content/plugins/latex/cache/tex_098d6f3c14c170fc07b67bdabfdfc304.gif): failed to open stream: No such file or directory in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 129
Warning: preg_replace(): The /e modifier is no longer supported, use preg_replace_callback instead in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 47
Warning: preg_replace(): The /e modifier is no longer supported, use preg_replace_callback instead in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 49
Warning: fopen(/data/htdocs/ibot/wpibot//wp-content/plugins/latex/cache/tex_e1e1d3d40573127e9ee0480caf1283d6.gif): failed to open stream: Permission denied in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 123
Warning: fputs() expects parameter 1 to be resource, bool given in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 124
Warning: fclose() expects parameter 1 to be resource, bool given in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 126
Warning: getimagesize(/data/htdocs/ibot/wpibot//wp-content/plugins/latex/cache/tex_e1e1d3d40573127e9ee0480caf1283d6.gif): failed to open stream: No such file or directory in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 129
Warning: preg_replace(): The /e modifier is no longer supported, use preg_replace_callback instead in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 47
Warning: preg_replace(): The /e modifier is no longer supported, use preg_replace_callback instead in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 49
Warning: fopen(/data/htdocs/ibot/wpibot//wp-content/plugins/latex/cache/tex_54bedf895d7c6608b88041e9c33d1a3f.gif): failed to open stream: Permission denied in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 123
Warning: fputs() expects parameter 1 to be resource, bool given in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 124
Warning: fclose() expects parameter 1 to be resource, bool given in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 126
Warning: getimagesize(/data/htdocs/ibot/wpibot//wp-content/plugins/latex/cache/tex_54bedf895d7c6608b88041e9c33d1a3f.gif): failed to open stream: No such file or directory in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 129
Warning: preg_replace(): The /e modifier is no longer supported, use preg_replace_callback instead in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 47
Warning: preg_replace(): The /e modifier is no longer supported, use preg_replace_callback instead in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 49
Warning: fopen(/data/htdocs/ibot/wpibot//wp-content/plugins/latex/cache/tex_ee209b85f6fd73430edc5ba414ddfff7.gif): failed to open stream: Permission denied in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 123
Warning: fputs() expects parameter 1 to be resource, bool given in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 124
Warning: fclose() expects parameter 1 to be resource, bool given in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 126
Warning: getimagesize(/data/htdocs/ibot/wpibot//wp-content/plugins/latex/cache/tex_ee209b85f6fd73430edc5ba414ddfff7.gif): failed to open stream: No such file or directory in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 129
Warning: preg_replace(): The /e modifier is no longer supported, use preg_replace_callback instead in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 47
Warning: preg_replace(): The /e modifier is no longer supported, use preg_replace_callback instead in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 49
Warning: fopen(/data/htdocs/ibot/wpibot//wp-content/plugins/latex/cache/tex_b687ac7bf0999ace0680defac4be196e.gif): failed to open stream: Permission denied in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 123
Warning: fputs() expects parameter 1 to be resource, bool given in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 124
Warning: fclose() expects parameter 1 to be resource, bool given in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 126
Warning: getimagesize(/data/htdocs/ibot/wpibot//wp-content/plugins/latex/cache/tex_b687ac7bf0999ace0680defac4be196e.gif): failed to open stream: No such file or directory in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 129
Warning: preg_replace(): The /e modifier is no longer supported, use preg_replace_callback instead in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 47
Warning: preg_replace(): The /e modifier is no longer supported, use preg_replace_callback instead in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 49
Warning: fopen(/data/htdocs/ibot/wpibot//wp-content/plugins/latex/cache/tex_ec69cdd8451f3fb2f240849c33ba32f0.gif): failed to open stream: Permission denied in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 123
Warning: fputs() expects parameter 1 to be resource, bool given in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 124
Warning: fclose() expects parameter 1 to be resource, bool given in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 126
Warning: getimagesize(/data/htdocs/ibot/wpibot//wp-content/plugins/latex/cache/tex_ec69cdd8451f3fb2f240849c33ba32f0.gif): failed to open stream: No such file or directory in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 129
Warning: preg_replace(): The /e modifier is no longer supported, use preg_replace_callback instead in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 47
Warning: preg_replace(): The /e modifier is no longer supported, use preg_replace_callback instead in /data/htdocs/ibot/wpibot/wp-content/plugins/latex/latex.php on line 49
片足に四個、両足で八個の圧力センサー(FSR402)を足の裏に装着した。生成されるデータは、抵抗値でそれを電圧値に変換して、ADコンバーターMCP3208でデジタルデータにして、ロボット上のRaspberryPIで処理・出力させてみる。
人間にとっても、足の裏の微妙な圧力感覚はすごく大事だ。靴下と足の間に小さな異物があっても、気になって仕方がない。昔、経済学者の間で、博士の学位を取ることを「足の裏の米粒」と表現していたことがある。「価値はないが、取らないと気になって仕方がない」ものというわけだ。
写真のように、ロボットの足の裏とセンサーの間にワッシャーを噛ませた。そうしないと、平たいものに平たいものつけても圧力が出ない。ロボットが、配線のお化けのようになってきた。
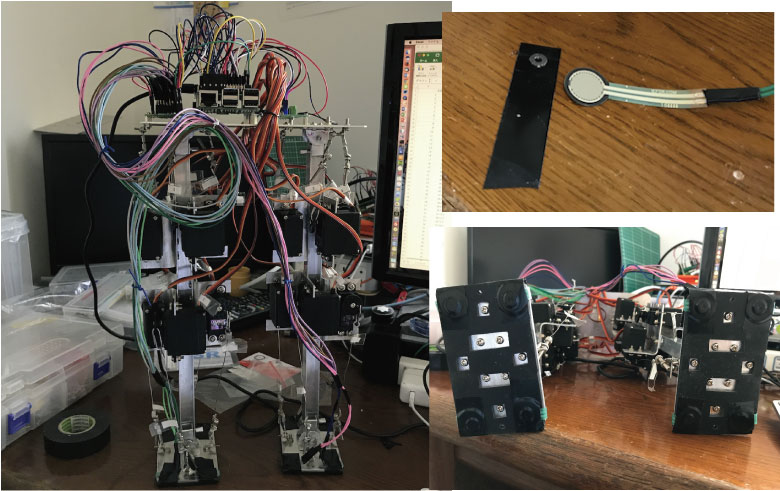 足の裏に磁石付き絆創膏を張ったような感じだ。毎秒10個のセンサーデータを10秒間とったデータは以下のようなものだ。
足の裏に磁石付き絆創膏を張ったような感じだ。毎秒10個のセンサーデータを10秒間とったデータは以下のようなものだ。
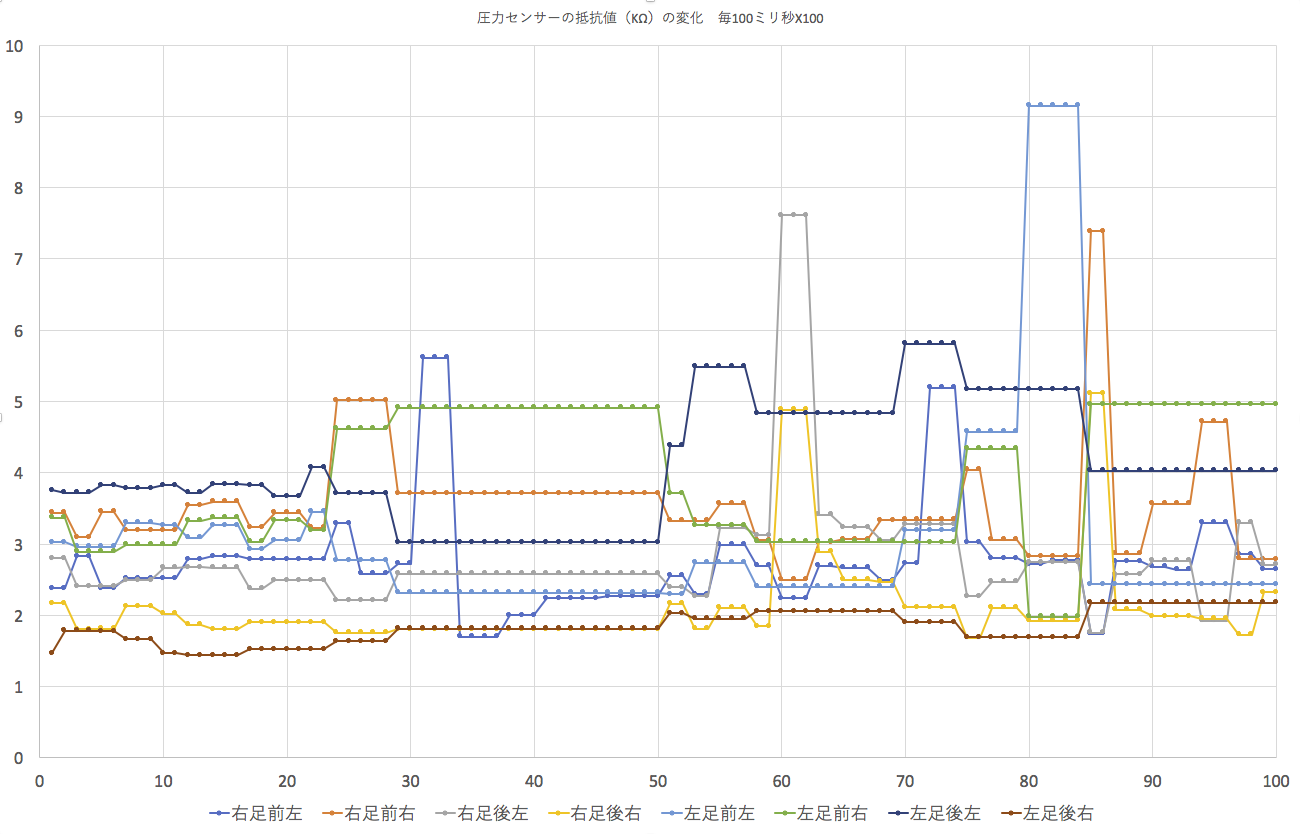
縦軸の出力値は以下のように変換している。
仕様書によれば、ADコンバーターMCP3208の出力値は

で出力される。4096は、12ビットで出力されているということだ。前の記事にもあるように、
 は、3.3Vである。
は、3.3Vである。一方、記事の図にあるように、FSR402には、5.1KΩ(5100Ω)の抵抗をかましている。学校で習ったように
 を応用する。
を応用する。流れる電流は、FSRの抵抗値を
 とすると、FSRの両端の電圧
とすると、FSRの両端の電圧 は
は
である。
これを変形すると、MCP3208のデータ出力を
 として、
として、
となる。これがΩの抵抗値であるから、それをKΩに変換したものが、上記の縦軸である。
この抵抗値までは、ロバスト(頑健性)な値だが、では実際これがどれだけの圧力かというのは、いろいろな誤差もある値になる。仕様書によればおよそ以下のような関係があるという。

縦軸が抵抗値(KΩ)で横軸が重力加速度で表した力だと思う。その力が幾つだからというのは、あまり関係がない。先の図では、だいたい1kΩから10kΩの範囲の値を示しているので、その間の圧力との関係がおよそ上記のようなものだということを知っていれば良いと思う。縦軸は対数目盛になっているので、原点に対する凸性は、実際の値ではもっと厳しくなっている。
そこまでわかったところで、先の図の8個のセンサーの出力を見てみよう。上に行くほど圧力が弱くなっているので、足が浮き加減になると10に近い値まで跳ね上がっている。
じゃあ、全体として何が言えるの?と聞かれても、私には難しい。そこで、人工知能にこれを捉えてもらって、ロボット自身の姿勢制御に使いなさいとうことなのだ。さらに、加速度センサーも追加するので、そういう、ロボットの感覚情報を、プログラマブルに、外側の人間がああだこうだというのは、意味がない。
さしあたって、加速度センサーを、足のむこうずねと、足のひらに4個追加してみよう。センサーをフル装備させるのだ。
全てJAVAでいけることになった
サーボの制御も、センサーの制御も全てJAVAでできるようになった。脳に当たるディープラーニングするニューラルネットもJAVAで動かすので、JAVAで閉じられる。
さしあたって、ロボットの制御プログラムをC++から、JAVAに書き換えよう。
加速度センサーデータのJavaによる取得(プログラム付)
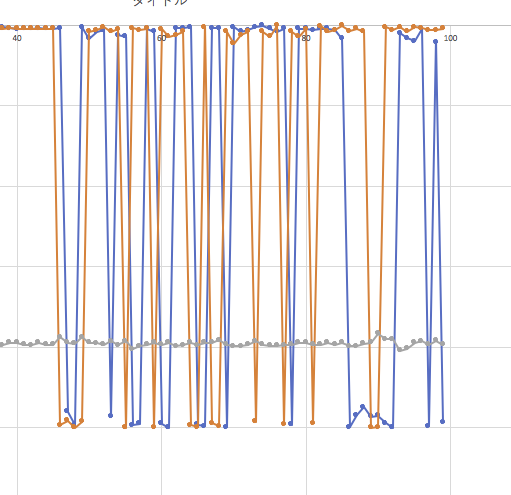
加速度センサーKXSD9のデータをJavaで取ろうとしたら、問題にはまって、なかなか解決しなかったがようやく原因がわかって綺麗なデータを取れるようになった。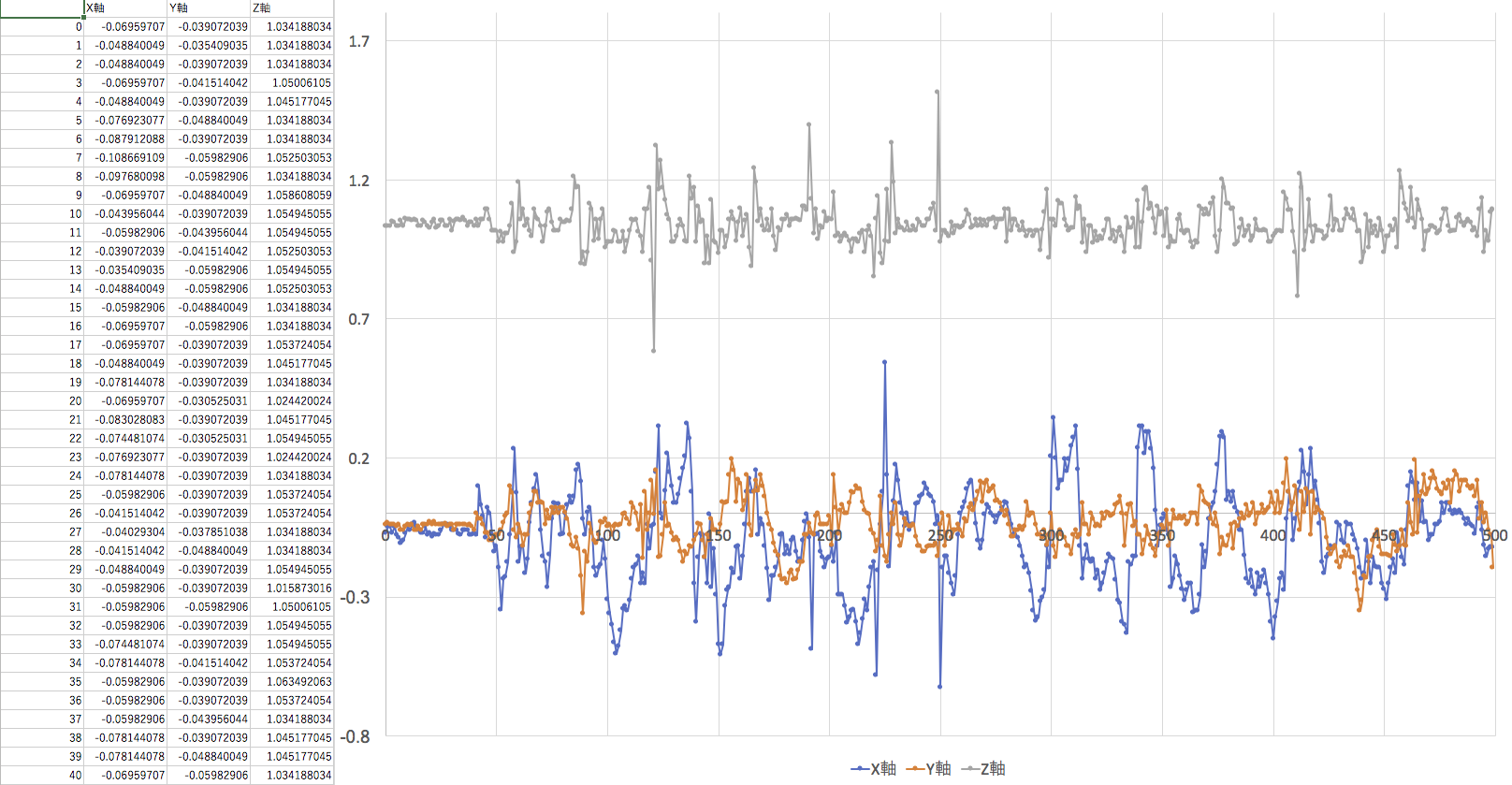
初めは、なんか、データが飛び飛びになってうまくいかなかったのだ。こんな感じである。さっぱりダメだった。
先の投稿にも書いたように、電圧のせいかと思って、電源からDCコンバーターM78AR033-0.5を入れてコンデンサーつけたりして3.3Vを独立に確保したが、これも結局問題解決にならず。元のC++のプログラムだと綺麗にデータが取れるので、配線の間違いでもセンサーの問題でもRaspberryPIの問題でもない。
結局わかった。問題は、WiringPi経由でデータを取得するとき、C++の場合は、unsigned charのバッファで取得するのだが、Javaの場合はbyte配列を用いる。それが当然だと思って、そうしているだけで何かに暗示されたわけではない。
私はてっきり、byteはunsigned charと同じで整数変数にキャストして入れても負数にはならないだろうと思いこんでいた。つまり、0-255の範囲の値を出すだろうと思っていたのだが、実は、-127から+127の値を出力して、整数変数に自動キャストで入れると突然負の値が出てきてしまうのだ。
センサーデータは、12ビットで出てくるので、C++の場合、一つの軸(例えばX軸)のデータは、以下のように変換する。
xregH = spi_buff[0][1];
xregL = spi_buff[0][2];
xout = xregH << 4 | xregL >> 4;
spi_buffはunsigned charのバッファで、xregH、xregLは上位ビットの整数値、下位ビットの整数値を取り出して、上位を4ビット左にシフトさせ、下位ビットを4ビット右にシフトさせて論理和を取れば12ビットの値が取れる。そこに負が出てくるなど想定しなくていい。
ところが、同じことをunsigned charの代わりにJAVAのbyteでやると簡単に負になってしまって、予期しない値が取れてしまうというわけだ。結局、整数に変換しするときに上位ビットをマスクするという操作が必要だった。
xregH = (spi_buff[0][1] & 0xff);
xregL = (spi_buff[0][2] & 0xff);
xout = xregH << 4 | xregL >> 4;
こうすればうまくいくことがわかったのである。
ちょんちょん!!
JAVAのプログラムは次のようになる。Pi4Jのライブラリが必要になることは、前にこちらに書いたのでそれを参考にしてほしい。
package aicoro;
import com.pi4j.wiringpi.Gpio;
import com.pi4j.wiringpi.Spi;
/**
*
* @author Toyoaki WASHIDA
*/
public class Accelerometer {
int speed = 1000000; //通信速度(Hz)
int SPI_CHANNEL = Spi.CHANNEL_1;
int SS_PORT = 7;
Accelerometer() throws InterruptedException{
// setup SPI for communication
System.out.println("SPIチャンネル初期化します");
int fd = Spi.wiringPiSPISetup(SPI_CHANNEL, speed);
if (fd <= -1) { System.out.println(" ==>> SPI SETUP FAILED");
return;
}
System.out.println("PIO初期化します");
if (Gpio.wiringPiSetup() == -1) {
System.out.println(" ==>> GPIO SETUP FAILED");
return;
}
Gpio.pinMode (SS_PORT, Gpio.OUTPUT);
//SS信号初期化
Gpio.digitalWrite(SS_PORT, 1);
Thread.sleep(0, 130);
byte com[] = new byte[2];
com[0] = 0x0c; // address byte
com[1] = (byte) 0xe3; // register byte
// 設定を(+/-2g 819 counts/g)にして、小さい範囲を細かく見ている
Gpio.digitalWrite(SS_PORT, 0);
int err = Spi.wiringPiSPIDataRW(SPI_CHANNEL, com, 2); //データ送受信
Gpio.digitalWrite(SS_PORT, 1);
if (err <= -1) {
System.out.println("加速度センサー設定エラー(1)");
return;
}
Thread.sleep(0, 130);
com[0] = 0x0d;
com[1] = 0x40; // こちらはデフォルト設定のまま
Gpio.digitalWrite(SS_PORT, 0);
err = Spi.wiringPiSPIDataRW(SPI_CHANNEL, com, 2); //データ送受信
Gpio.digitalWrite(SS_PORT, 1);
if (err <= -1) {
System.out.println("加速度センサー設定エラー(2)");
}
/////////////////設定状況を読み取る/////////////////////////////
Thread.sleep(0, 130);
com[0] = (byte) 0x8c;
com[1] = 0x00; // こちらはデフォルト設定のまま
Gpio.digitalWrite(SS_PORT, 0);
err = Spi.wiringPiSPIDataRW(SPI_CHANNEL, com, 2); //データ送受信
Gpio.digitalWrite(SS_PORT, 1);
if (err <= -1) {
System.out.println("加速度センサー設定エラー(2)");
}
System.out.println("CTL_REGCの値 = "+String.format("0x%02x",com[1] ));
Thread.sleep(0, 130);
com[0] = (byte) 0x8d;
com[1] = 0x00; // こちらはデフォルト設定のまま
Gpio.digitalWrite(SS_PORT, 0);
err = Spi.wiringPiSPIDataRW(SPI_CHANNEL, com, 2); //データ送受信
Gpio.digitalWrite(SS_PORT, 1);
if (err <= -1) {
System.out.println("加速度センサー設定エラー(2)");
}
System.out.println("CTL_REGBの値 = "+String.format("0x%02x",com[1] ));
}
double[] sensorValue() throws InterruptedException {
// デバイスからデータ取得
double [] sense = new double[3];
byte [][] spi_buff = new byte[3][3]; //送受信用バッファ
int xregH, xregL, xout;
int yregH, yregL, yout;
int zregH, zregL, zout;
double xac, yac, zac;
for (int i = 0; i < 3; i++) {
spi_buff[i][0] = (byte)(0x80 + 2 * i);
spi_buff[i][1] = 0;
spi_buff[i][2] = 0;
Gpio.digitalWrite(SS_PORT, 0);
int err = Spi.wiringPiSPIDataRW(SPI_CHANNEL, spi_buff[i], 3); //データ送受信
Gpio.digitalWrite(SS_PORT, 1);
Thread.sleep(1, 130);
if (err == -1) {
System.out.println("sensorValue: 書き込みエラー(1)");
break;
}
//System.out.println("データを受け取りました ret = "+err);
}
xregH = (spi_buff[0][1] & 0xff);
xregL = (spi_buff[0][2] & 0xff);
//System.out.println("xregH = "+xregH+" xregL = "+xregL); //(short) (valueByte & 0xFF);
xout = xregH << 4 | xregL >> 4;
yregH = (spi_buff[1][1] & 0xff);
yregL = (spi_buff[1][2] & 0xff);
yout = yregH << 4 | yregL >> 4;
zregH = (spi_buff[2][1] & 0xff);
zregL = (spi_buff[2][2] & 0xff);
zout = zregH << 4 | zregL >> 4;
xac = (double) (xout - 2048) / (double) 819;
yac = (double) (yout - 2048) / (double) 819;
zac = (double) (zout - 2048) / (double) 819;
//
sense[0] = xac;
sense[1] = yac;
sense[2] = zac;
return sense;
}
}
加速度センサーのデータ落とし
JAVAでSPI経由で加速度センサーがなんとか制御できそうになってきたのに、加速度センサーがデータを落とすときがある。JAVAプログラムの原因ではなく、加速度センサーは複数で確認した、圧力センサーは同じSPIポートで正常なので、3.3Vの電圧不足なのではないかと、疑っている。
SPIの配線
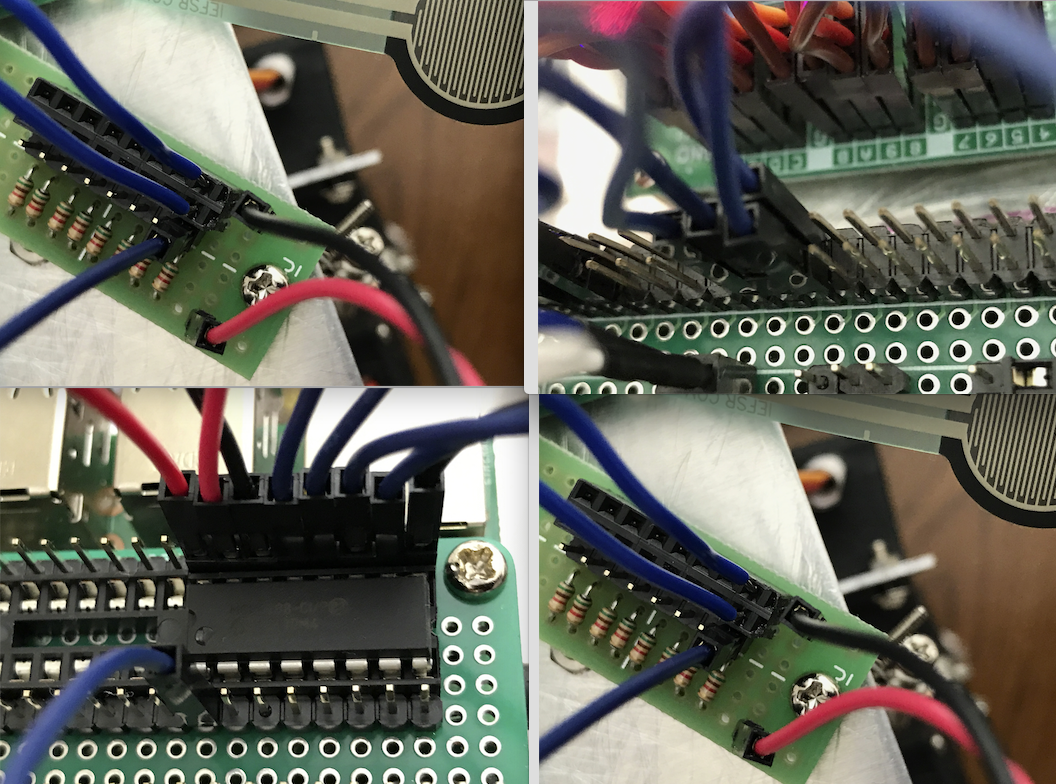
シリアル接続が、サーボ群の制御用にはI2Cを使い、圧力センサーと3D加速度センサーと両方でSPIをパラレルに使うようになって、RaspberryPI上の配線が異様に複雑になってきた。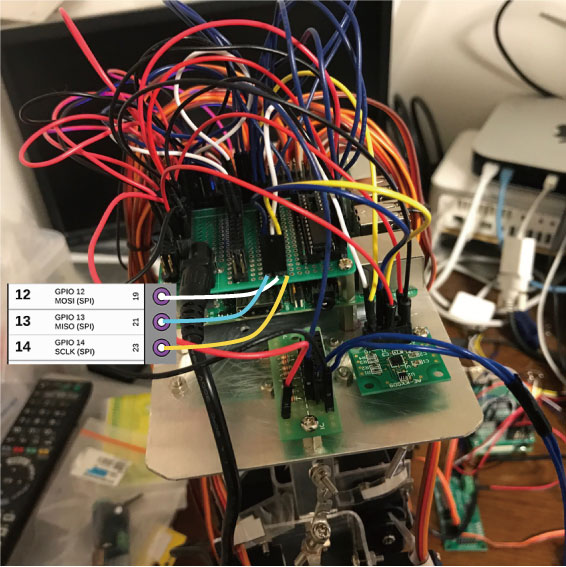
SPIをパラレルに幾つも使うために、クロック(SCLK)と入力(MOSI)及び出力(MISO)はバス方式で使うようにRaspberryPIの上のボードにコネクタをつけた。コネクタのどのピンがどれに対応しているかを忘れてしまいそうだから、上に画像をつけた。要するに、右からクロック(SCLK)、入力(MOSI)、出力(MISO)のピンとなっている。
なお、GPIOのCE0ピンを圧力センサ用に、CE1ピンを加速度センサ用に使っている。
I2Cを経由して、JAVAでサーボモータを制御する
この間、ディープラーニングは圧倒的にC++よりもJAVAが良いことがわかって、全てをロボットの制御システムを全てJAVAに変えようとしている。
センサー系は、SPIで制御するのだが、これはPi4Jプロジェクトのライブラリでなんとかなりそうなことはわかった。
サーボモーターは、I2C経由で制御する。これも、Pi4Jのライブラリを使えばなんとかなりそうだということで、昨夜から格闘して、ようやくなんとかなってきた。いつものように記録しておく。
pi4jには、サーボモーター制御のサンプルコードは、
PCA9685GpioServoExample.java
PCA9685GpioExample.java
の二つがある。Servoという言葉が入っている初めのものを使おうとしたが、結局、なぜかサーボが異常に熱くなってしまい、動かないので、2番目のを使った。
初めは、パルスの作り方などを細かく変えなくちゃいけないんじゃないかと思って色々いじったが、結局、ほとんど素のままで使えることがわかった。ありがたい。使うところだけ抜き出して、インターフェイスの部分の関数を付け加えると次のようになる。
package aicoro;
import com.pi4j.gpio.extension.pca.PCA9685GpioProvider;
import com.pi4j.gpio.extension.pca.PCA9685Pin;
import com.pi4j.io.gpio.GpioController;
import com.pi4j.io.gpio.GpioFactory;
import com.pi4j.io.gpio.GpioPinPwmOutput;
import com.pi4j.io.gpio.Pin;
import com.pi4j.io.i2c.I2CBus;
import com.pi4j.io.i2c.I2CFactory;
import java.io.IOException;
import java.math.BigDecimal;
/**
* Pi4JのPCA9685GpioServoExample.javaを参照したもの
*/
public class Servo {
// MG996R用に調整した
private static final int SERVO_DURATION_MIN = 770; // 1670/2=835
private static final int SERVO_DURATION_NEUTRAL = 1570;
private static final int SERVO_DURATION_MAX = 2370;
final PCA9685GpioProvider provider;
Servo() throws I2CFactory.UnsupportedBusNumberException, IOException{
System.out.println("PCA9685を初期化します");
//PCA9685GpioServoExample.javaの値をそのまま使っている
BigDecimal frequency = new BigDecimal("48.828");
BigDecimal frequencyCorrectionFactor = new BigDecimal("1.0578");
// Create custom PCA9685 GPIO provider
I2CBus bus = I2CFactory.getInstance(I2CBus.BUS_1);
provider = new PCA9685GpioProvider(bus, 0x40, frequency, frequencyCorrectionFactor);
// Define outputs in use for this example
GpioPinPwmOutput[] myOutputs = provisionPwmOutputs(provider);
// Reset outputs
provider.reset();
}
void setAngle(int ch, double degree) {
if (degree < -90 || degree > 90) {
System.out.println("setAngle() range err give degree = " + degree);
return;
}
int pulseWidth = SERVO_DURATION_NEUTRAL + (int) (SERVO_DURATION_NEUTRAL * (degree / 90.0));
//cout << "setAngle() pulseWidth = " << pulseWidth << endl;
Pin pin = PCA9685Pin.ALL[ch];
provider.setPwm(pin,pulseWidth);
}
private static GpioPinPwmOutput[] provisionPwmOutputs(final PCA9685GpioProvider gpioProvider) {
// サーボモータの名前を与える、どの関節に関わっているかを明確にする意味がある
GpioController gpio = GpioFactory.getInstance();
GpioPinPwmOutput myOutputs[] = {
gpio.provisionPwmOutputPin(gpioProvider, PCA9685Pin.PWM_00, "Pulse 00"),
gpio.provisionPwmOutputPin(gpioProvider, PCA9685Pin.PWM_01, "Pulse 01"),
gpio.provisionPwmOutputPin(gpioProvider, PCA9685Pin.PWM_02, "Pulse 02"),
gpio.provisionPwmOutputPin(gpioProvider, PCA9685Pin.PWM_03, "Pulse 03"),
gpio.provisionPwmOutputPin(gpioProvider, PCA9685Pin.PWM_04, "Pulse 04"),
gpio.provisionPwmOutputPin(gpioProvider, PCA9685Pin.PWM_05, "Pulse 05"),
gpio.provisionPwmOutputPin(gpioProvider, PCA9685Pin.PWM_06, "Pulse 06"),
gpio.provisionPwmOutputPin(gpioProvider, PCA9685Pin.PWM_07, "Pulse 07"),
gpio.provisionPwmOutputPin(gpioProvider, PCA9685Pin.PWM_08, "Pulse 08"),
gpio.provisionPwmOutputPin(gpioProvider, PCA9685Pin.PWM_09, "Pulse 09"),
gpio.provisionPwmOutputPin(gpioProvider, PCA9685Pin.PWM_10, "Always ON"),
gpio.provisionPwmOutputPin(gpioProvider, PCA9685Pin.PWM_11, "Always OFF"),
gpio.provisionPwmOutputPin(gpioProvider, PCA9685Pin.PWM_12, "Servo pulse MIN"),
gpio.provisionPwmOutputPin(gpioProvider, PCA9685Pin.PWM_13, "Servo pulse NEUTRAL"),
gpio.provisionPwmOutputPin(gpioProvider, PCA9685Pin.PWM_14, "Servo pulse MAX"),
gpio.provisionPwmOutputPin(gpioProvider, PCA9685Pin.PWM_15, "not used")};
return myOutputs;
}
}
必要ないかもしれないが、センターの位置だけ少し変えている。
void setAngle(int ch, double degree)
関数に、サーボモーターの番号と、角度を与えれば良い。javaのmain関数は、別に与えること。その中で、このクラスをインスタンス化して、上の関数を呼べば良い。
不要かもしれないが、動画をつけておく。
圧力センサーFSR402をRaspberryPi上のJAVAで制御する
ロボットの足の裏につける圧力センサーのデータを取得しようと、やってみた。データは取れているようなので、ここで記録のために書いておく。(ほんと、年取ると、やったことをすぐ忘れるので、このサイトに書いておかないと、継続性が全く確保できなくなる ^^;)
なず、ディープラーニングのAICOROがJAVAで高速で動くので、RASPVERRYPIのシリアルコントローラもJAVAにしたいと思っていたら、pi4jというプロジェクトがあって、そこにライブラリがあるので、それを使うことにした。
その前に、大事な、大事な配線である。
まず、
http://www.eleki-jack.com/FC/2011/10/arduinofsr2.html
の図を少し使わせていただく。
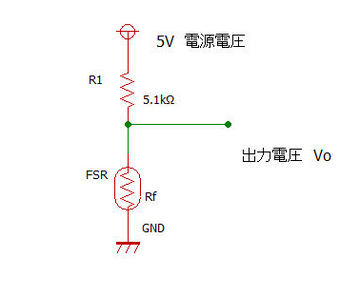
昨日作った、FSR402とADコンバーターMCP3208とを中継するデバイスは、上記の図のように接続する。(そういえば、電源3.3Vにつないでいたけど、ちょっとまずかったかな、5Vに変えてみよう)
電源とGNDは、特に問題ないと思う。出力電圧V0の線を、MCP3208のCH0に接続する。
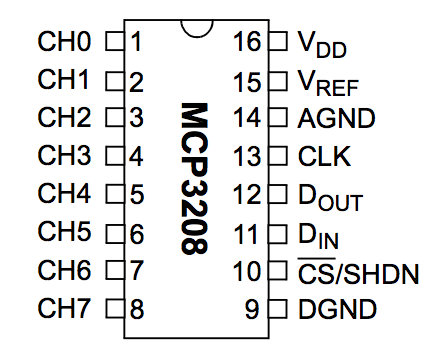 図の1番ピンである。気持ちとしては、足の裏に合計8つの圧力センサーを貼るつもりだから、この8つのチャンネルを全て使えば良いと思っている(ただ、その辺りは誤解かもしれない)
図の1番ピンである。気持ちとしては、足の裏に合計8つの圧力センサーを貼るつもりだから、この8つのチャンネルを全て使えば良いと思っている(ただ、その辺りは誤解かもしれない)
16ピンVDDと15ピンVREFは、電源の3.3Vにつなぐ。仕様書によれば、5.5VまでOKだ。
14ピンと9ピンはアースする。
CLKは、RASPBERRYPIのSCLKにつなぐ。
DOUTは、RASPBERRYPIのMISOピンにつなぐ。
DINは、RASPBERRYPIのMOSIピンにつなぐ。
10ピンCSは、RASPBERRYPIのCE0につなぐ。CE1でもいいはずだがプログラムの変更が必要。
次にプログラムである。JAVAで動かすのだが、まず、
http://pi4j.com/
から、SPIコントロール用の、ライブラリを取ってこなければならない。ダウンロードのページから、
- pi4j-1.2-SNAPSHOT.zip Compressed ZIP Archive
を取ってくる。pi4j-1.1という正式リリース版があるのだが、こちらは、RaspberryPIの最新カーネルに対応していなくてエラーになる。フォーラムで同じ問題にぶつかった人の応答でそのことがわかった。
それを解凍して、そのライブラリをNetbeansのライブラリに付け加える。そうすれば、ライブラリが使えるようになる。Netbeansを使わないやり方は、知らない。JAVAはもう何年もNetbeansでしかプログラミングしていないので(笑)
先に解凍した中に、examplesというフォルダがあって、なんとその中に、
MCP3208GpioExampleNonMonitored.java
というMCP3208を制御できるサンプルがあるではないか!!!!
これはそのまま使えます!!
というわけでできました。データを取っている動画は以下のようです。
圧力センサーFSR402をテスターでテストする
ロボットの足の裏に片足四個ずつつけようと思っている圧力センサーFSR402をテスターでテストしてみた。確かに抵抗値は変化する。