昨日、1日かけてやったことは、大学に運び込んだ足郎2の、スタンバイモードを決めたことだ。体重を足の中心に来るように足首を傾けて膝を微妙におる。それだけ。

カテゴリー: ロボット作り
足郎2、再開!!
「サリーと教授」がM-1の一回戦を通過するという妨害の事態が発生したために、昨日、その二回戦が終わるまでの2ヶ月、足郎2が放置された。結果、二回戦は通過しなかったが、サリー(ヒューマノイドロボットNAO)のロボットネタは相当進化したので、それはそれで良かった。
で、今日から、足郎2の再開である。悲しいことに、相当記憶の中から消えているので、中止前の状況を頭の中で再現するのに、今日1日くらいはかかりそうだ。
机の上で動かすのは大変なので、大学の研究室に持っていこうと思う。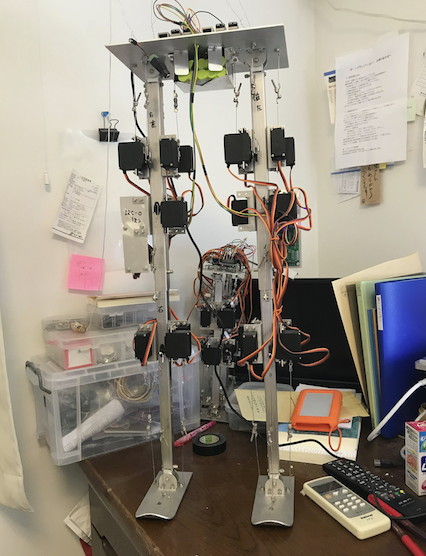
足郎2が進まない
本当は、ハード的には組み上がった足郎2を本格的に動かしていなければならない状況なのだが、予想外の事態が発生したために、そちらは全く進まなくなった。
というのは、私的ロボットのサリーと私のコンビ(サリーと教授)が漫才グランプリのM-1の一回戦に合格してしまったのだ。それ嬉しいことだが、合格するとは正直思っていなかった。そもそも、ロボットのコンビで漫才と言えるのかどうか、それすら怪しかった。が、演芸ロボットを普及していかなければならないという使命感で、出たのだ。
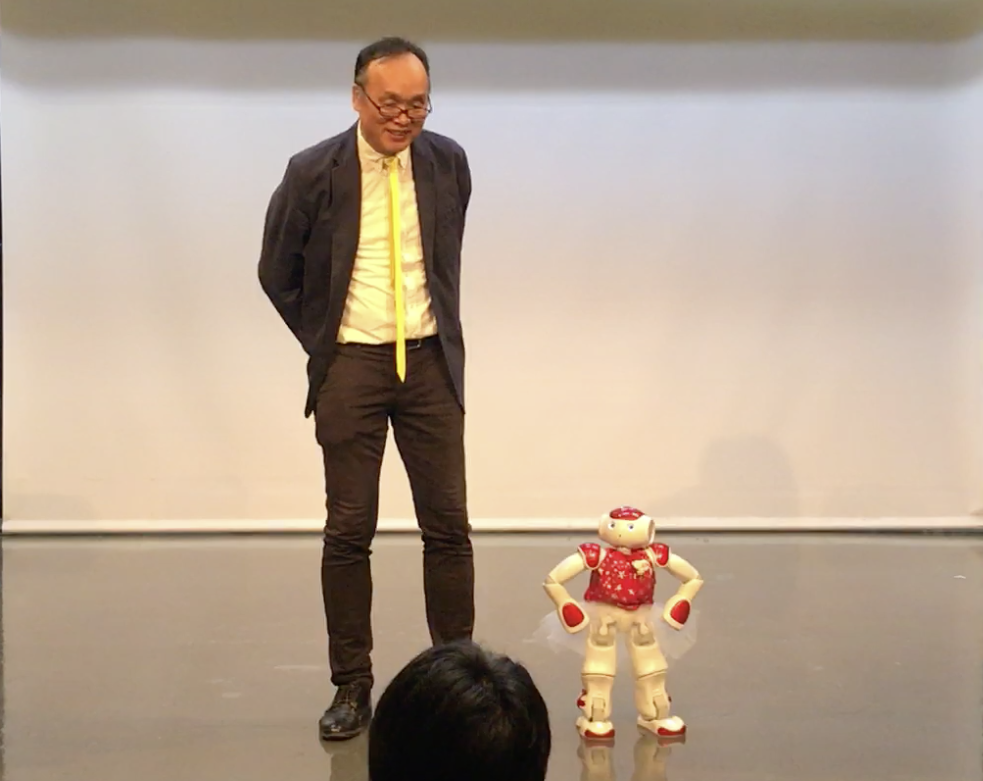
普通、二人でやる漫才で、着飾ったロボットを抱えて順番待ちするのは恥ずかしかったが、まあ、一度だけだと思った。合格を知ったときは、腰を抜かすほど驚いた。プロでも落ちるM-1なのだ。
10月に2回戦があるので、そのために、ネタのデータやプログラムを改定していかなければならない。それに忙殺されている。だから、足郎には手が回らないというわけだ。
COSMの改訂
足郎2を動かす前に、足郎制御言語cosmとそのインタープリターを改訂する。実際に動かし始めるとそれに集中したいからだ。
(1)サーボグループの角度定義に配列を設定できる。
ロボットのある一連のサーボを現在の状態から別の状態に変化させるのは、%defangles で、その角度群を定義するのだが、同じグループを連続で滑らかに変化させる場合に、いちいちそれを定義し直していくのは面倒なので、角度名の後に連続で定義し、配列に入れる。
(2)全ての定義の中で、空白を無視するようにする
今までは、定義の中では、空白は使えなかったが不便なので。
例えば、結局以下のように定義できる。
%defangles right_invpen[3] {
#右に傾ける動きをする [0] [1] [2]
RightUpperRight: -$righ, $righ2, $righ3;
RightUpperLeft: +$right, $righ2_1, $righ3;
LeftUpperRight: -$left, $left2, $left3;
LeftUpperLeft: $left, $left2, $left3_1;
LeftKneeFront: -$bent, $bent2_1, $bent3;
LeftKneeBack: $bent, $bent2_2, $bent3;
RightLowerRight: $right, $righ2, $righ3;
RightLowerLeft: -$right, $righ2, $righ3_1;
LeftLowerRight: $left, $left2_2, $left3;
LeftLowerLeft: -$left, $left2, $left3_2;
}
垂直直立の確認
朝から、足郎2の垂直直立の調整をやっている。
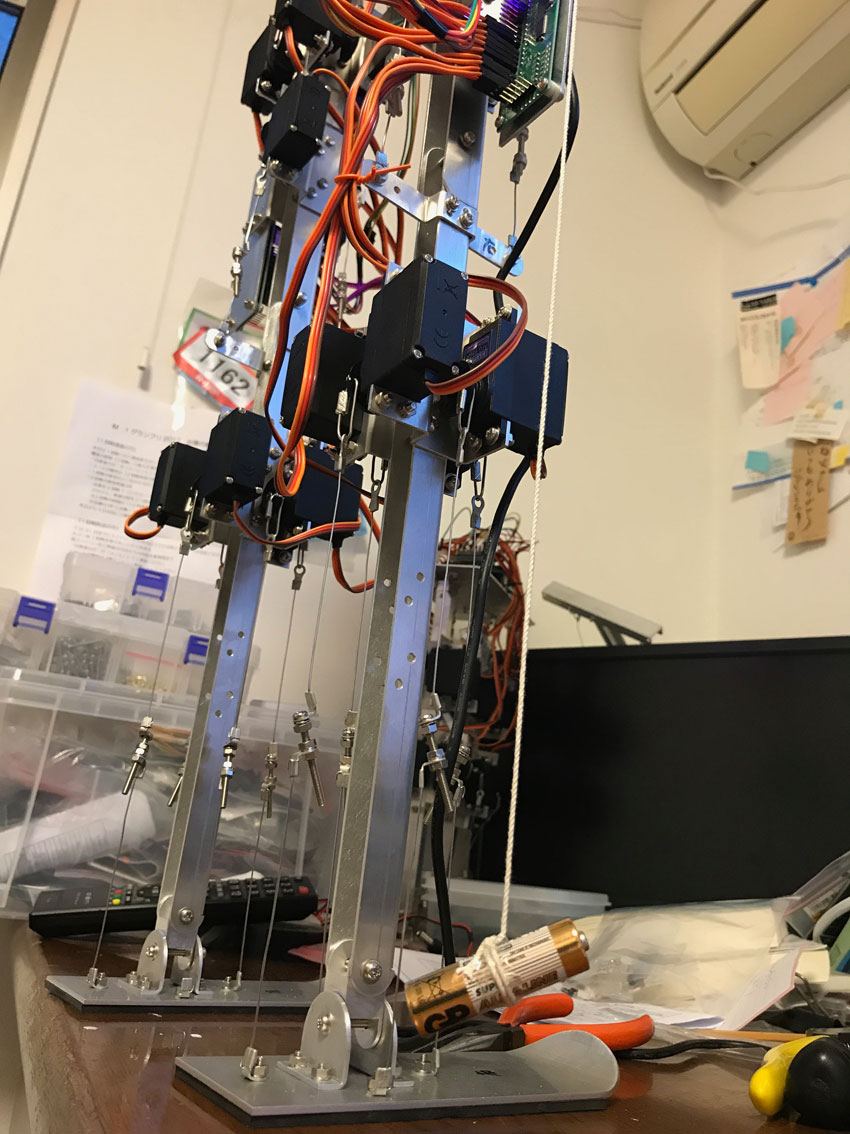
これまで、三角定規なのでやっていたが、足郎2は背が高いので、オモリをぶら下げた紐で確認するのがいい。紐に電池をぶら下げて垂直を見ている。前後左右に確認しなければならない。その度に、サーボからのリードの長さを変える。
単に一つのリードの長さで、一つの垂直が決まるのではない。そこに足郎2の複雑さがある。膝の関節は単純だが、他は色々関連している。上板で左右の足がつながっているので、一つの垂直がある意味全体のリード線の影響を受けていると言っても良い。
ただ、そういう、相互依存性が、これだけの体をか弱いサーボで動かすことができる理由でもある。一つのサーボに重さや動きが集中していると、支えきれなくなる。
動作上の組み立ては終わった
動作に関わる部品の組み込みが終わった。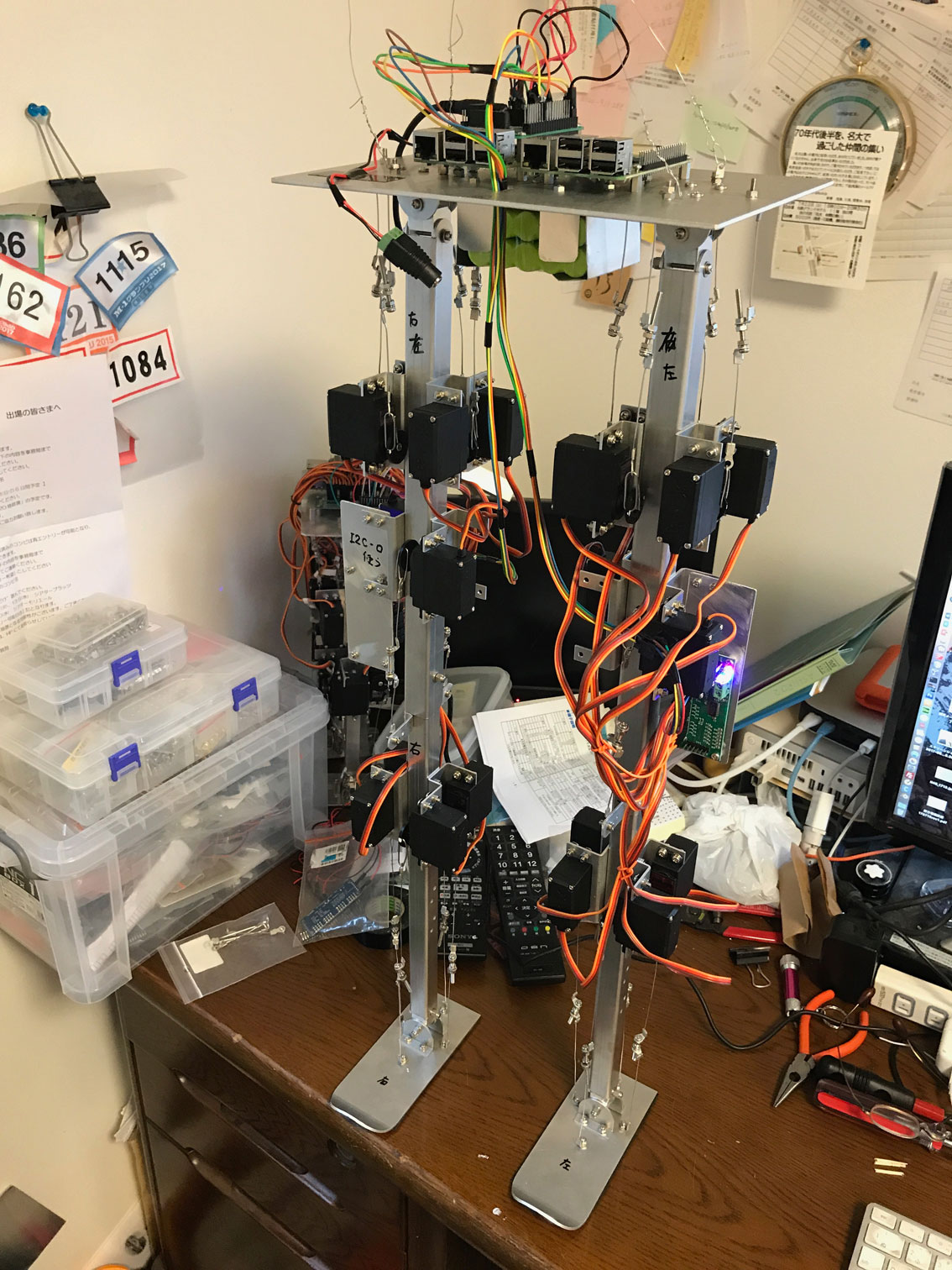
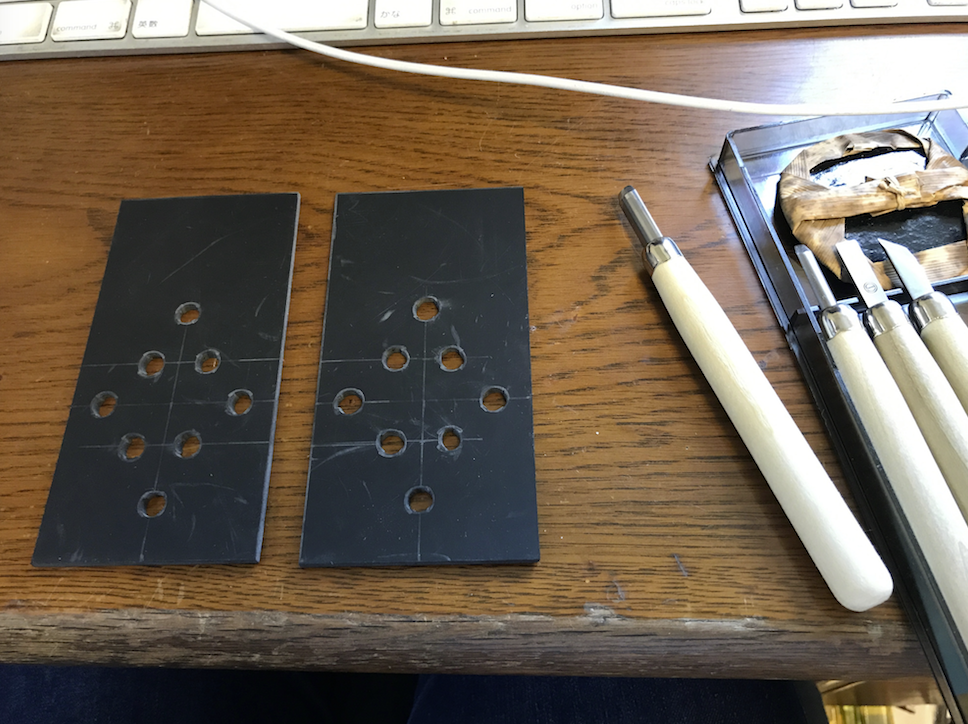
足の裏につけるゴムの、ネジ穴部分のくりぬきに今回は、彫刻刀を使ったら、割と綺麗に仕上がった。
垂直に立てるのが苦労するところ。
ただ、今回は、フレームが業者に作ってもらい、精密なので、重りをつけて鉛直に垂らした糸で、ほぼ正確に垂直を捉えて、リード線の調整をした。
あとはネジを完全に固定して、プログラムで動かすだけだ。
ただ、ここにきて、NAOの方の業務ができたので、動かすのはしばらくお預けになる可能性がある。
RaspberryPIで二つ目のI2CチャンネルをPCA-9685用に動かす
足郎2では、左右の足を別のスレッドで動かし、かつそれぞれ別のI2Cチャンネルを使うことにしている。
RaspberryPIで二つ目のI2Cチャンネルを動かすことについては、
http://robo.genv.sophia.ac.jp/wp_robot/?p=1645
にだいぶ書いておいた。
ただ、これをサーボドライバPCA-9685用に動かすためには、一つ面倒な作業がある。それは、I2Cのデフォルトである1チャンネルは、すでにRaspberryPIのボード内でプルアップされているのであるが、この第二チャンネルは、プルアップされていないので、外部プロアップをしなければならないのである。
ただ、秋月電子のボードには、プルアップ用の抵抗がすでに取り付けられていて、このJ1とJ2を、直結すればSDAとSCLの二つのピンがプルアップされる。
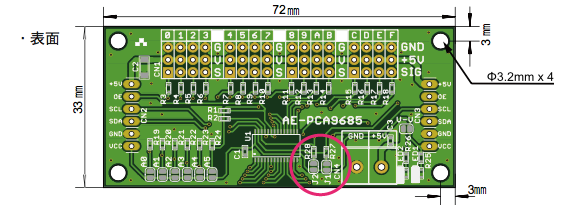
直結する方法に戸惑ったが、ハンダで無理やりすれば良いのだと了解して、そうしている。今の所不都合はない。
二足歩行の意味
なぜロボットに二足歩行をさせるのか?
単純に考えれば、人が二足歩行しているからそれを真似させるということだ。見る側も、ロボットが四足歩行をしているよりも、二足歩行をしている方が、自分に対する親近感、共感を覚えやすいから、惹きつけられる。それを期待しているわけだ。
単なる移動であれば、四足歩行でも、多足歩行でも良いような気がする。
しかし、逆振り子型の二足歩行にこだわっていると、二足歩行には別の意味があるように思える。移動には、二足歩行の方が、他の多足歩行よりも簡便であり、省エネルギーなのではないかということだ。
モアイの移動を、逆振り子でやっている動画を先にお見せした。逆振り子は、あの深刻な重量のモアイ像をいとも簡単に移動させてしまう。
人間の歩行も、極めて省エネではないか。3足歩行はイメージがわかないが、四足歩行は、確かに安定している。チータは、確かに四足歩行で、100キロを超えるスピードを出す。それはすごい。しかし、二足歩行と四足歩行を同じ速さで、同じ重さで、測ったら、距離あたりのエネルギーは二足歩行の方が小さいのではないか?
そう思って検索したら、そういう研究論文がすでに発表されていることがわかった。
http://www.afpbb.com/articles/-/2255112?pid=1790817
二足歩行の必要エネルギーは四足歩行の四分の一というわけだ。
それが二足歩行への進化の要因だという考えには、批判もあるようだが、二足歩行が省エネルギーという事実が重要なのである。
やはりそうなのだ。予想は正しかった。つまり、ロボットの二足歩行へのこだわりは、省エネルギー型移動への模索という意味を持っている。
足郎2は今作っているところだが、足郎1でわかったのは、体を揺らして、ほんのわずかの前進操作をするだけで、歩み出すということだった。
足郎2が完成すれば、あの大きくて長い足が、いとも簡単に歩き出す様子をお見せできるはずだ。
NAOもそうだがホンダのASIMOも、その二足歩行は、人の動きを真似るためのただのパフォーマンスに見えて仕方がない。効率的移動という目的意識性を感じないのだ。
私は、このサイトに、逆振り子の理論から、足郎0(1本足ロボット)、足郎1と逆振り子型移動の理論とモデルを示してきた。この方向を、さらに徹底して追求していきたい。
足の配線完了
サーボドライバーボードのPCA-9685は片足それぞれについている。足郎1のように、上板上のコンピュータ側におくと配線が混雑してダメだからだ。ドライバーボードは16個のサーボモータを制御できるが、片足は10個しかついていない。この二つのボードは、RaspberryPIのI2Cの二つのポートを使う予定だ。RaspberryPIには、デフォルトでは1個のI2Cしか動かせないが、もともと2つついているのでその二つを動かす。
したがって、RaspberryPIそのものは、一つしか必要ないのだが、会話や知的な機能を担うために二台乗せてある。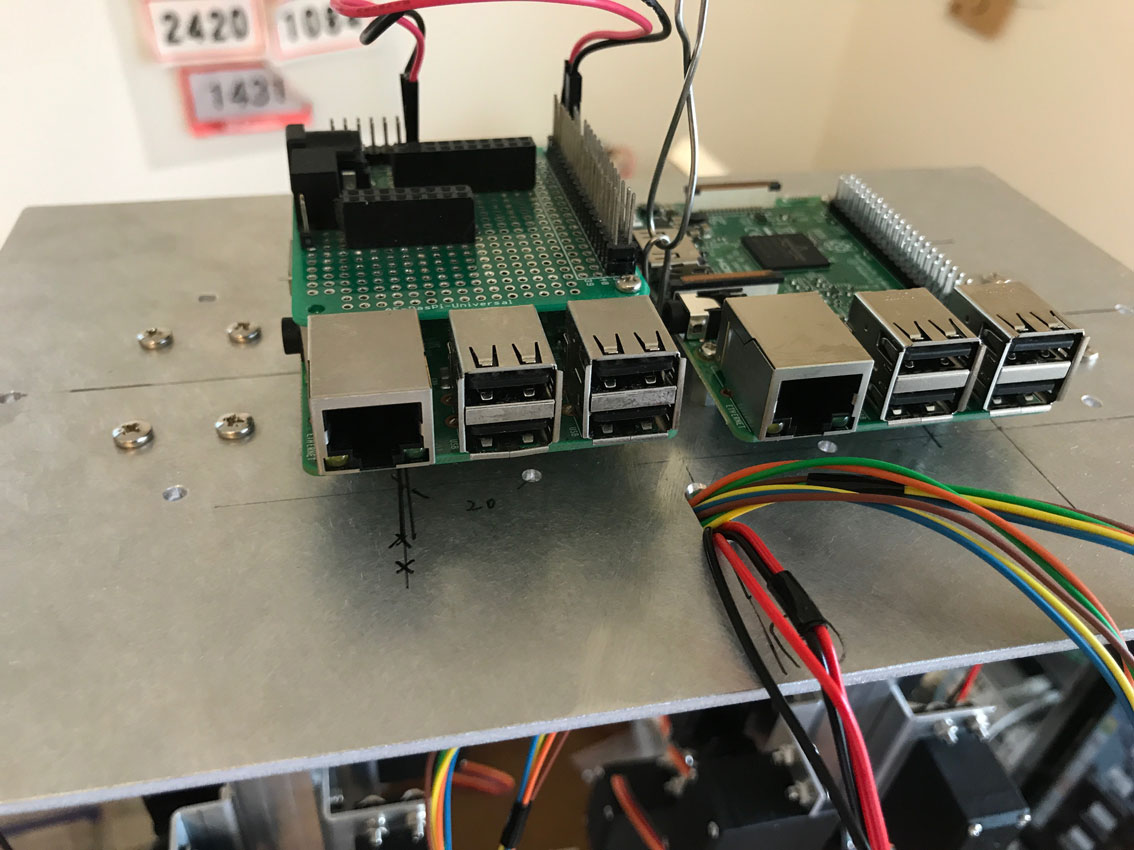
当面は一つしか動かさない。
電池ボックスを股間に設置するのだが、いったんRaspberryPI を外さないとつけれない。
そのあと、サーボと関節をつなぐワイヤーをセットすれば、動作に関する部分は終える。
サーボモータをつける
今日は、この夏一番の暑さだった。
そんな中、サーボモータを全部つけた。
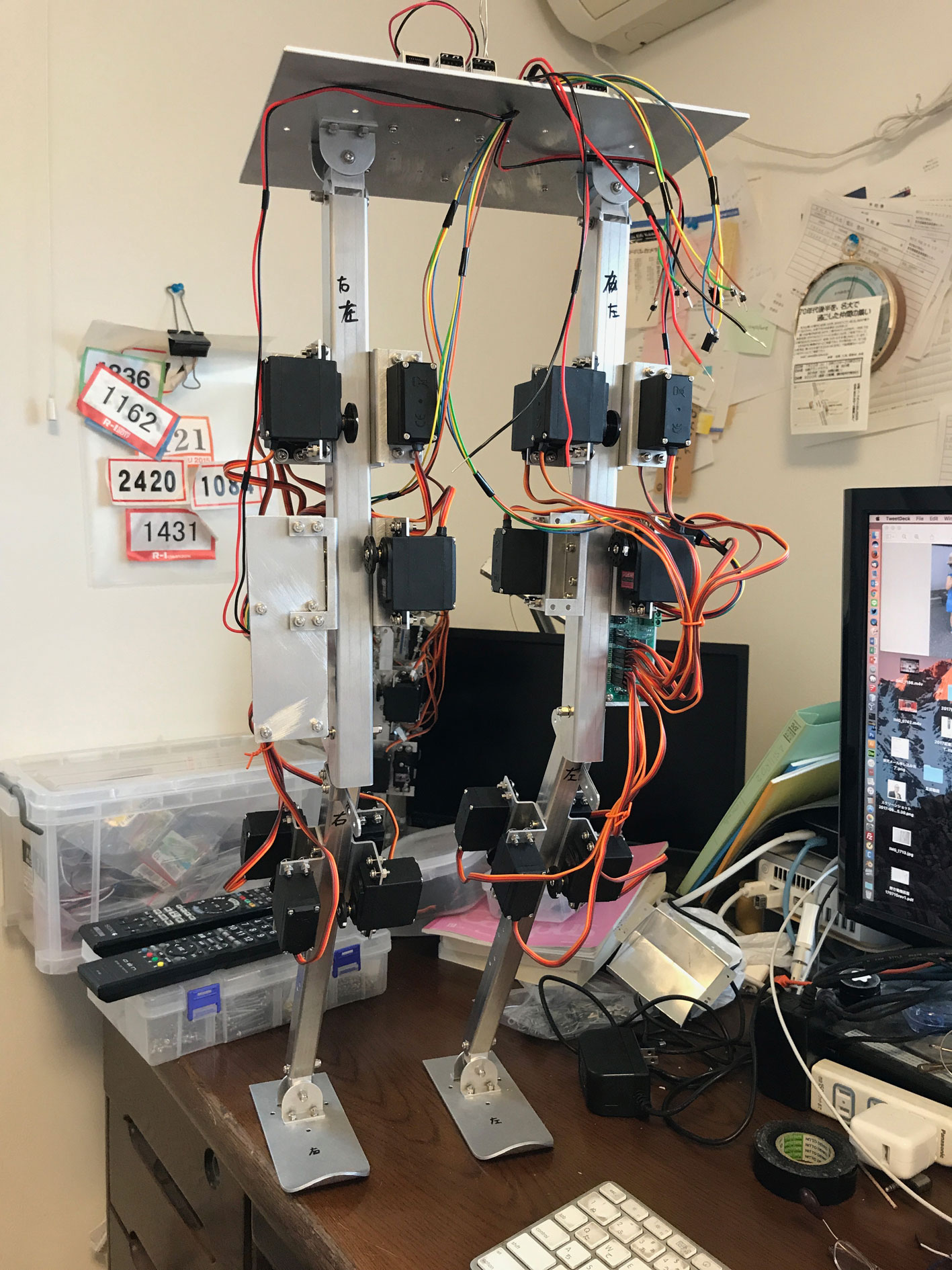
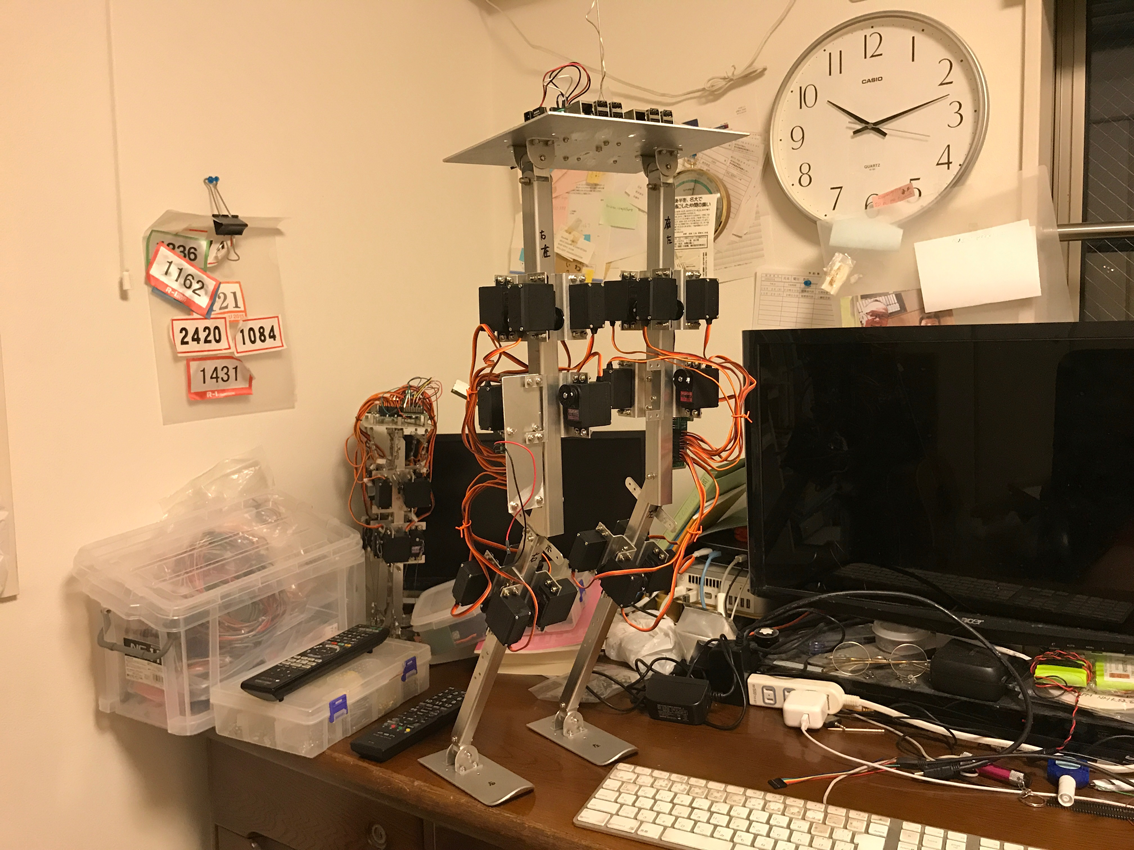 うわ板の真ん中でぶら下げているのだが、左右のバランスは完璧に取れている。当たり前だが。
うわ板の真ん中でぶら下げているのだが、左右のバランスは完璧に取れている。当たり前だが。
何だか、恐竜のベロキラプトルのような格好なのだ。ジュラシックパークに出てきた(笑)
明日は、動きの部分だけは仕上げたい。